Привод для откатных ворот своими руками
Откатные ворота сегодня являются очень популярным решением для въезда на огражденную территорию.
Объясняется это довольно просто: они позволяют экономить место для открытия, даже несмотря на то, что могут иметь внушительные размеры.

Привод на откатные ворота
Привод для откатных ворот служит не только удобным дополнением при эксплуатации, но и надежно защищает территорию от несанкционированного вторжения.
Как выбрать привод для откатных ворот
Для того чтобы откатные ворота бесперебойно функционировали на протяжении долгих лет, нужно очень ответственно подойти к вопросу подбора автоматики.
Здесь учитываются многие факторы, и перед тем, как купить привод для откатных ворот, необходимо внимательно с ними ознакомиться:
- Эксплуатация ворот: насколько часто они будут работать при максимальной нагрузке, каково предполагаемое количество циклов в час или день.
- Несущая система ворот: от нее зависит, насколько легко будет перемещаться полотно ворот.
- Площадь ворот.
- Масса створки.
- Правильность установки. Расстояние между роликовыми опорами должно быть подсчитано с максимальной точностью.
Тяжелые кованые конструкции потребуют привод для откатных ворот намного мощнее, чем более легкие, такие, как с решетчатой створкой. Если речь идет о частном доме, где проживают несколько человек, то подойдет привод с интенсивностью эксплуатации в 30%.
Если в течение часа осуществляется проезд 10-15 автомобилей, то необходим привод на откатные ворота с интенсивностью 50%. Высокоинтенсивная автоматика устанавливается при очень больших нагрузках.
Из чего состоит и как работает привод для откатных ворот
Сдвижные ворота могут быть консольные или подвесные, при этом направляющая крепится вверху или внизу. Сегодня есть множество моделей приводов разных производителей, но комплектующие у всех практически одинаковы.
Привод для откатных ворот, как правило, монтируют на фундаменте, возле створки.
Состоит он из таких элементов:
- электродвигатель, имеющий ведущую шестерню;
- редуктор с жидкой или консистентной смазкой внутри;
- блок управления.
Электроника и фрикционная муфта осуществляют управление усилием, которое передается непосредственно на полотно специальной зубчатой рейкой, установленной на воротах. Примечательно, что система привода автоматически запирает дверь, поэтому закрытые ворота невозможно сдвинуть в сторону вручную и нет никакой необходимости в установке дополнительного замка.

Зубчатая рейка и привод для открытия ворот
Установка привода для откатных ворот
Прежде чем устанавливать привод для откатных ворот, надо проверить, насколько легко происходит открывание створки. Существует ошибочное мнение, что установка автоматики способна решить проблему плохого хода ворот.
К работе нужно приступать, только окончательно убедившись, что ворота не заедают и свои функции выполняют плавно и четко. В случае обнаружения каких-то изъянов, их нужно обязательно ликвидировать, иначе привод для откатных ворот может стать негодным еще в самом начале эксплуатации.
Для самостоятельной установки автоматики на ворота необходимо приобрести нужный комплект, а также подготовить материалы и инструменты для выполнения работы:
- привод для откатных ворот;
- зубчатая рейка;
- элементы крепежа;
- сигнальная лампа и фотоэлементы;
- ПДУ;
- сварочный аппарат;
- провод для подведения питания к приводу сечением 2х1,2 либо 2х2;
- провода для подключения фотоэлементов сечением 2х0,5 и 4х0,5;
- провод для подключения сигнальной лампы сечением 2х0,5;
- дрель со сверлами, саморезы.
Монтаж привода
Варианты основ для автоматического управления достаточно разнообразны, поэтому выбор зависит от индивидуальных требований. Основными видами являются:
- Привод цепной.
- Привод верхний.
- Привод тросовый.
Исходя из этого, при приобретении базового комплекта нужно учитывать то, как будут использоваться ворота в будущем.
Электропривод закрепляется на швеллере, в месте расположения роликовых кареток. Для того чтобы определиться с местом установки привода, из набора берется монтажное основание, на которое его и крепят. После чего производится его установка на швеллер между каретками в непосредственной близости от проема ворот.
Для правильного выбора местоположения, нужно воссоздать рабочее положение автоматики. Чтобы сделать это наиболее точно, необходимо положить зубчатую рейку на шестерню.
Так можно сразу увидеть, куда следует подвинуть привод, чтобы рейка могла расположиться по центру шестерни, и ее можно было прикрепить к профильной трубе наружного каркаса (направляющий рельс для крепления использовать не следует).
На выбранном месте по периметру обваривается установленное стальное монтажное основание. Затем нужно снять крышку корпуса и через отверстие протянуть шнур. После этого привод для откатных ворот фиксируется при помощи болтов.

Установка зубчатой рейки
Установка зубчатой рейки
Полностью открыв створку ворот, в центре шестерни нужно поставить зубчатую рейку. Причем очень важно оставить необходимый отрезок для дальнейшего обустройства концевых выключателей. Приварив к трубе каркаса створки детали для крепления зубчатой рейки, необходимо протянуть ворота.
После установки нового отрезка процедура повторяется. Очень важно следить за тем, чтобы между стыками образовался «зуб».
Затем с помощью сварочного аппарата вся зубчатая рейка прихватывается, а элементы крепежа дополнительно обвариваются. Между шестерней и рейкой нужно выставить зазор примерно в 1-2 мм.
Делается это так: на рейке отвинчиваются болты, ее выставляют так, чтобы при движении она могла соприкасаться с шестерней, создавая характерное цоканье.
Монтаж концевых выключателей
Концевые выключатели закрепляются на зубчатой рейке при помощи болтов. Они бывают двух видов:
- Механические: их применяют наиболее часто из-за простоты в установке. Работают следующим образом: пружинка, находящаяся на приводе, сгибается вбок при наличии препятствия, вследствие чего происходит остановка движения.
- Магнитные: отличаются надежностью в любых погодных условиях. Принцип работы заключается в следующем: на рейке расположен магнит, когда он проходит возле привода, специальный механизм осуществляет остановку. Есть левый и правый концевые выключатели. Их располагают таким образом, чтобы один находился к приводу плюсом, а другой – минусом.
Настройка концевых выключателей осуществляется на расстоянии приблизительно 1 м. Если привод для откатных ворот останавливается во время прохождения концевика, значит, расположение верное. В противном случае магниты нужно поменять местами.

Схема установки автоматики на ворота
Как подключить привод
Привод для откатных ворот нужно подключается к питанию в строгом соответствии с прилагаемой инструкцией. Как правило, это фаза «AC-L» и ноль «АС-N». Важным этапом является тестирование.
При нажатии кнопки на пульте ДУ привод для откатных ворот будет приводить их в движение. Настройка времени на открывание/закрывание осуществляется при полном закрытии ворот. Для этого нужно нажать кнопку Р1 и удерживать ее 2-3 секунды.
После этого осуществляется полное открывание, а в памяти электропривода остается время, необходимое для полного цикла этого действия. Поэтому если привод для откатных ворот по какой-либо причине не отключится концевым выключателем, то произойдет автоматическое отключение согласно запрограммированному времени.
Установка фотоэлементов и сигнальной лампы
Фотоэлементами считаются два прибора, один из которых является передатчиком, а второй — приемщиком света. Если на пути такого луча есть препятствие, ворота двигаются назад. Главным условием при установке фотоэлементов является то, что они должны располагаться друг напротив друга. Это нужно для качественного принятия сигнала.
Есть такие способы установки фотоэлементов:
- Фиксация на столбиках, где крепятся нижний улавливатель и верхние ролики.
- Приваривание металлических элементов к столбам.
- Самодельный столбик, который изготавливается самостоятельно из профилированной трубы с последующим прикреплением к нему фотоэлемента.
Выбирается способ, наиболее подходящий для каждого конкретного случая. Фиксация фотоэлементов осуществляется с помощью обычных саморезов, как и сигнальная лампа, которая, как правило, располагается по стороне проезжей части.
Именно она информирует водителей автомобилей о выезде машины с участка.
Конечно, устанавливать такую лампу или нет, решает хозяин. Но многие профессионалы настоятельно советуют отнестись к этому серьезно, и тем самым в полном объеме выполнить правила безопасности.
. .Установка электропривода на откатные ворота
 Сейчас все чаще можно увидеть в загородных коттеджах, частных домах или на въезде на различные охраняемые территории конструкции, работающие в автоматическом режиме. Для функционирования автоматических откатных ворот используется привод, позволяющий открывать и закрывать створки, независимо от погодных условий и прочих факторов.
Сейчас все чаще можно увидеть в загородных коттеджах, частных домах или на въезде на различные охраняемые территории конструкции, работающие в автоматическом режиме. Для функционирования автоматических откатных ворот используется привод, позволяющий открывать и закрывать створки, независимо от погодных условий и прочих факторов.
Такая большая популярность этих конструкций обусловлена их практичностью, надежностью и безотказностью, что гарантирует чрезвычайно длительный период эксплуатации.
На отечественном рынке представлен большой выбор различных моделей приводов для откатных ворот, которые, несмотря на качество комплектующих и отличия в дизайне, работают по одинаковому принципу. При этом процесс установки таких устройств осуществляется в одинаковой последовательности.
Оборудование и комплектующие для монтажа привода.
Предварительно следует установить ворота и подготовить место для монтажа привода. Для нормального функционирования автоматики откатные конструкции должны легко открываться и закрываться. Таким образом можно обеспечить бесперебойную и длительную эксплуатацию всей конструкции. Если посредством монтажа привода попытаться решить проблему открывания заклинивающих створок ворот, то такие меры могут привести только к выходу из строя всего устройства и дополнительным финансовым затратам.
Комплект для установки автоматического привода состоит из следующих элементов:
- Электронный привод.
- Специальная зубчатая рейка.
- Пульты дистанционного управления (ДУ).
- Дополнительные элементы системы безопасности.
- Сигнальный фонарь.
Дополнительно потребуются следующие комплектующие и оборудование:
- Детальная схема установки.
- Аппарат для электросварки.
- Электродрель и сверла по металлу разного диаметра.
Для обеспечения электропитанием устройств необходимы провода сечением:
- Привод — 2х1,5 или 2х2 мм.
- Два фотоэлемента — 4х0,5 (4х0,75) и 2х0,5 (2х0,75) мм.
- Сигнальная лампа — 2х0,5 (2х0,75) мм.
Если у Вас появились вопросы, позвоните нам: +7 (495) 783-06-56
ПОЛУЧИТЬ КОНСУЛЬТАЦИЮ
Монтаж привода.
Привод, обеспечивающий автоматическое открытие и закрытие подобных воротных конструкций, представляет собой сборочный механизм, который включает в себя:
- Крепежные элементы.
- Площадку для установки автоматики.
- Непосредственно привод.
- Защитный короб.
Перед монтажом автоматики следует предварительно отрегулировать ход ворот и позаботиться о том, чтобы в процессе открывания конструкции отсутствовали какие-либо скачки и не приходилось прилагать чрезмерных усилий. Также чрезвычайно важно использовать уровень, чтобы с его помощью выставить идеально ровно площадку, на которой будет производиться установка автоматики, что существенно ускорит и облегчит монтаж оборудования. Только после этого можно приступать непосредственно к установке.
Сам процесс монтажа привода происходит в несколько этапов:
1. Определение местоположения привода.
На швеллере, оснащенном двумя прочными роликовыми каретками (бетонируется в процессе установки ворот), необходимо выбрать место оптимально подходящее для монтажа электропривода. Для этого потребуется на шестерню электропривода положить зубчатую рейку и продвинуть ее до того момента, пока она не займет положение ровно посредине, что обеспечит ее надежное и правильное закрепление на профильной трубе наружного каркаса.
2. Монтаж автоматики.
После проведения всех необходимых расчетов необходимо на выбранное место на швеллере установить монтажное основание, изготовленное из качественной стали и обварить его по периметру электросваркой. Затем при помощи специальных болтовых соединений (обычно идут в комплекте) на него крепится привод.
Перед началом монтажа нужно тщательно осмотреть устройство на наличие на нем различных механических повреждений. При обнаружении каких-либо дефектов ни в коем случае нельзя устанавливать устройство, а следует обратиться к производителю для его замены.
В некоторых случаях в процессе монтажа требуется слегка приподнять привод. Для этих целей можно воспользоваться профильной трубой 40х20, 50х50 и других размеров, к которой следует приварить устройство.
Для функционирования системы автоматики требуется электричество. Поэтому для работы привода нужно предварительно подвести к месту его монтажа кабель для электропитания.
3. Установка зубчатой рейки.
 В процессе установки зубчатой рейки стандартной длиной в 1 метр и имеющей три овальных регулировочных отверстия требуется терпение, предельное внимание и максимальная точность. Ведь если в ходе монтажа будут допущены ошибки и неточности, то двигатель будет во время открывания ворот пробуксовывать, что приведет к его перегреву и быстрому выходу из строя.
В процессе установки зубчатой рейки стандартной длиной в 1 метр и имеющей три овальных регулировочных отверстия требуется терпение, предельное внимание и максимальная точность. Ведь если в ходе монтажа будут допущены ошибки и неточности, то двигатель будет во время открывания ворот пробуксовывать, что приведет к его перегреву и быстрому выходу из строя.
Кроме этого, главное условие нормальной работы ворот – это наличие зазора в 1 мм между рейкой и шестерней привода. Прогиб полотна всего в 5 мм может привести к тому, что в одном конце воротной конструкции привод будет хватать рейку за конец зуба. При этом примерно посередине, ворота уже будут двигаться на шестерне привода, а не на роликовых каретках. В свою очередь, это приводит к ускоренному износу шестерни, подшипников устройства и перегоранию электродвигателей.
Для того чтобы избежать таких фатальных последствий лучше всего приварить крепление под рейку по месту без зазора. Причем если понадобится получить зазор, то перед установкой рейки можно подложить под электродвигатель несколько шайб толщиной не более 1 мм, которые после завершения работы нужно будет удалить. Также можно просто поднять зубчатую рейку на 1 мм. Конечно же, во время монтажа рейки таким способом от сварки пострадает полотно ворот. Однако эту проблему можно очень просто решить с помощью баллончика с краской.
4. Закрепление зубчатой рейки.
Следует учитывать, что наряду с зазором, в процессе установки нескольких реек, необходимо выдержать между ним определенное расстояние, чтобы обеспечить получение «правильного зуба». Для выполнения этой задачи рекомендуется взять две рейки и вложить в них на месте стыка еще один аналогичный элемент, что позволит определить оптимальный зазор между зубами.
После этого можно приступать к процедуре монтажа зубчатой рейки. Установка этого элемента состоит из нескольких действий, которые нужно выполнять в определенной последовательности:
- Перед началом процедуры ворота должны быть полностью открыты, а электропривод переключен в режим разблокировки.
- Затем следует установить в середине привода зубчатую рейку с шестеренкой. При этом нужно обязательно оставить на рейке место под крепление для концевых выключателей.
- Потом необходимо поставить на шестеренку электродвигателя первую рейку и приварить ее непосредственно к полотну откатных ворот.
- Далее воротная конструкция передвигается в сторону на 1 метр и на шестерню электропривода устанавливается следующая рейка, которая пристыковывается к первой (с учетом получения «правильного зуба») и также приваривается. В конечном итоге должна получится идеально ровная рейка.
- Происходит регулировка зазора между шестеренкой привода и зубчатой рейкой, который не должен превышать 1 мм. Только в этом случае гарантируется плавное движение воротной конструкций. В том случае, если люфт превышает допустимые параметры, то открытие ворот будет осуществляться с усилием, рывками и сопровождаться характерными стуками.
- После завершения всех работ, связанных с монтажом и регулировкой зубчатой рейки, необходимо еще раз обварить все крепежные элементы.
Для регулировки зазора между рейкой и шестерней достаточно проделать несколько элементарных манипуляций. Для этого необходимо просто отвинтить крепежные болты на зубчатой рейке и выставить ее таким образом, чтобы она при движении и соприкосновении с шестеренкой привода издавала характерное цоканье, а не стук.
5. Установка концевых выключателей.
После окончания монтажа привода и зубчатой рейки проводится установка концевых выключателей, которые бывают двух типов:
- Механические.
Такие устройства пользуются большой популярностью благодаря высокой надежности и элементарной установке. Также они отличаются простым принципом действия. На привод устанавливается специальная пружинка, а на рейку – концевик. Во время прохода над устройством он отклоняет пружинку в сторону, что обеспечивает выключение привода и приводит к моментальной остановке ворот. - Магнитные..
Такие элементы отличаются высокой надежностью и отлично справляются со своей задачей независимо от погодных условий. Функционирование подобных концевых выключателей основывается на полярности магнитных элементов. Данные элементы устанавливают непосредственно на зубчатую рейку. После прохождения магнита над приводом происходит активация специального механизма, обеспечивающего полную остановку устройства.
Практически все виды откатных ворот независимо от компании-производителя оснащаются современными и надежными концевыми выключателями на базе магнитов, а их механические аналоги уже почти не встречаются.
6. Настройка магнитных концевиков.
 В процессе установки данных элементов следует учитывать, что в зависимости от полярности, они бывают левыми и правыми (плюсом и минусом). Таким образом, если один концевик расположен к приводу плюсом, то другой обязательно должен быть размещен стороной с минусом. Причем если магниты перепутать местами, то ворота просто не будут останавливаться и их элементарно заклинит. Специально для удобства установки концевые выключатели окрашиваются в красный и синий цвета.
В процессе установки данных элементов следует учитывать, что в зависимости от полярности, они бывают левыми и правыми (плюсом и минусом). Таким образом, если один концевик расположен к приводу плюсом, то другой обязательно должен быть размещен стороной с минусом. Причем если магниты перепутать местами, то ворота просто не будут останавливаться и их элементарно заклинит. Специально для удобства установки концевые выключатели окрашиваются в красный и синий цвета.
Настройка этих элементов не отличается особой сложностью. Для этого необходимо установить концевые выключатели на расстоянии 1 метра напротив друг друга и запустить привод. В том случае, если после прохождения над электроприводом концевика ворота останавливаются, то это является наглядным свидетельством правильного расположения магнитов. В обратном случае, следует просто поменять выключатели местами. Как правило, такие испытания проводятся на середине воротной конструкции для того чтобы при возникновении проблем успеть остановить привод посредством пульта ДУ. Причем даже если не удастся вовремя остановить ворота и их заклинит, то для разблокировки достаточно просто открутить рейку и привести привод в соответствующий режим.
Удостоверившись в правильности установки магнитных концевых выключателей, остается раздвинуть их по краям воротной конструкции. Для закрепления магнитных концевых выключателей на зубчатой рейке используются специальные болты.
Следует принимать во внимание, что после срабатывания концевика ворота по инерции продолжают движение еще несколько сантиметров. Поэтому чтобы предотвратить преждевременный выход из строя редуктора из-за большой ударной нагрузки на шестерни и электродвигатель, лучше всего оставить определенный зазор в улавливателе еще во время регулировки.
7. Подключение и проверка.
Закончив установку всех основных элементов привода нужно обязательно проверить его работоспособность. Для этого необходимо подключить устройство к источнику электропитания согласно схеме и после этого приступать к тестированию.
Для начала проверки магнитных выключателей следует нажать на кнопку «Р1» на пульте ДУ, и привод автоматически начнет закрывать ворота до момента срабатывания концевика. Для настройки времени, за которое будет осуществляться открывание откатной конструкции, необходимо при полностью закрытых воротах нажать кнопку «Р1» и удерживать ее в таком состоянии на протяжении 3 секунд. В течение этого периода произойдет полное открывание и закрывание конструкции, а время будет зафиксировано в плате управления. Таким образом, если по каким-то причинам электропривод не остановится концевым выключателем, это произойдет в автоматическом режиме, после окончания времени, отведенного на осуществление данной операции.
Благодаря этому предотвращается выход из строя электродвигателя (иначе он просто будет работать вхолостую и перегорит, в случае попадания между воротами какого-нибудь мусора, обледенения уловителя, отпадания магнитного концевого выключателя и др.)
Монтаж и подключение периферийных устройств.
Только после того как все механические и прочие элементы автоматики привода будут установлены и протестированы, подключаются такие периферийные устройства, как фотоэлементы безопасности и сигнальная лампа.
Разумеется ворота могут функционировать и без этих дополнительных элементов. Тем не менее они требуются для обеспечения должного уровня безопасности и помогают избежать множества проблем в процессе эксплуатации данной откатной конструкции.
Особенности монтажа фотоэлементов.
Комплекс фотоэлементов безопасности состоит из передающего и принимающего устройства, которые размещаются перед воротами друг напротив друга. Между приборами на перманентной основе проходит световой луч. Причем пока между фотоэлементами проходит световой сигнал, то функционирование воротной конструкции происходит в нормальном режиме. Если в какой-то момент сигнал прерывается из-за появления на его пути транспортного средства, человека, собаки или любого другого неодушевленного предмета, то это приводит к автоматической остановке и запуску механизма обратного хода. Ворота начинают двигаться в обратном направлении, что позволяет избежать получения различных травм человеком или предотвратить повреждение транспортного средства.
Детальный процесс установки фотоэлементов.
Существует большое количество способов монтажа фотоэлементов, однако все они сходятся к проведению сходных по смыслу манипуляций. В частности, процедура монтажа таких приборов состоит из нескольких шагов:
Вначале необходимо установить передающее и принимающее устройства напротив друг друга, чтобы обеспечить беспрепятственное прохождение между ними светового луча. Фотоэлементы могут быть установлены на специальных металлических постаментах, которые нужно приварить к столбикам с нижним уловителем и верхними роликами. Также можно отдельно изготовить специальные столбики из стальной профильной трубы размером 50х50 мм и уже на них закрепить эти приборы при помощи обычных саморезов.
После этого можно приступать к подключению фотоэлементов непосредственно к приводу. Для этого потребуется в столбиках просверлить отверстия и провести провода сечением 4х0,5 (4х0,75) и 2х0,5 (2х0,75) под проезжей частью. Для обеспечения дополнительной защиты проводов от негативных внешних факторов, а также чтобы исключить возможность обрыва, их лучше поместить в гофрированный шланг.
Подключение фотоэлементов к приводу осуществляется по схеме, которая входит в комплект устройства.
Установка сигнального фонаря.
 В завершение процесса монтажа привода рекомендуется дополнительно установить специальный сигнальный фонарь. Основное предназначение данного элемента входящего в систему безопасности откатного устройства заключается в информировании транспортных средств, двигающихся по проезжей части, о выезде с территории автомобиля. Именно поэтому такой фонарь нужно установить со стороны дороги, чтобы обеспечить его хороший обзор всем участникам движения.
В завершение процесса монтажа привода рекомендуется дополнительно установить специальный сигнальный фонарь. Основное предназначение данного элемента входящего в систему безопасности откатного устройства заключается в информировании транспортных средств, двигающихся по проезжей части, о выезде с территории автомобиля. Именно поэтому такой фонарь нужно установить со стороны дороги, чтобы обеспечить его хороший обзор всем участникам движения.
Для крепления лампы можно использовать обычные саморезы. Для подключения к питанию потребуются провода сечением 2х0,5 мм или 2х0,75 мм. Естественно, можно вообще не устанавливать такой сигнальный фонарь на откатную конструкцию, однако в этом случае следует подготовиться к финансовым затратам на кузовной ремонт и покраску автомобиля 🙂
Заключение.
Таким образом, монтаж привода откатных ворот представляет собой достаточно трудоемкую и сложную процедуру, для осуществления которой требуются знания, опыт и профессиональное оборудование. Именно поэтому установку привода стоит доверить квалифицированным специалистам компании Брами, которые не только аккуратно и точно проделают такую работу, но и предоставят на нее длительную гарантию.
Схема электропроводки для откатных ворот. Схема подключения откатных ворот. Подключение автоворот. Схема подключения электроворот
Схема электропроводки для откатных ворот
Этот раздел посвящен прокладке электропроводки для автоматики откатных ворот. Электропроводку лучше всего делать вместе с заливкой фундамента откатных ворот и с кладкой столбов. В этом случае Вы имеете возможность спрятать провода в столбы и тем самым обеспечить эстетичный внешний вид Ваших ворот. Также Вы можете прочитать статьи: схема откатных ворот и фундамент для откатных ворот.
Видео процесса закладки электропроводки для откатных ворот:
Первое чего не нужно делать, это брать толстые провода — электрики «старой закалки» закладывают провода сечением 2,5мм2 и более, вплоть до 6мм2 меди, в том числе на фотоэлементы, кнопку-ключ, и прочую слаботочку. Единственный относительно толстый провод, который нужен для автоматики откатных ворот это кабель питания, и то не толще 1,5мм2.

На рисунке выше изображены типичные контакты-клеммы на плате управления автоматики ворот, максимальное сечение провода, которое можно зажать в них без дополнительных ухищрений 1,5мм, однако следует учесть, что некторые провода приходится скручивать вместе и после этого зажимать в клемму. На фотоэлементах эти клеммы еще меньше.
Итак, сначала рассмотрим схему электропроводки откатных автоворот.

На первый взгляд на ней ничего не понятно. Все в порядке — так и должно быть. Попробуем разобраться в ней, если мы хотим сэкономить свои деньги. Первое что нужно понимать это то, что все провода приходят к электроприводу на схеме он обозначен прямоугольником зеленого цвета, Свободные концы рекомендуется оставлять по 1-1,5м. Привод имеет смысл располагать сразу за роликовой кареткой той, что ближе к проему. Тем самым Вы уменьшите расход зубчатой рейки и не нужно будет отходить далеко от проёма, чтобы добраться до привода в случае надобности.
Итак, мы опредилились, что все провода идут к приводу и выходят в пластиковых гофрах с месте установки привода. На практике это реализуется так как показано на фото ниже:

Или так:

Рассмотрим первый кабель идущий от привода — это питание 220В, его есть смысл делать кабелем ПВС 3х1,5. Этот провод идет от привода к розетке или автомату. На автоматику ворот рекомендуется устанавливать стабилизатор напряжения.
Второй кабель — от привода на сигнальную лампу, на схеме он обозначен 2х0,75 (можно взять и 2х0,5 и даже меньше, ампераж на лампе небольшой). Идет этот кабель от привода на верхушку столба ближнего к приводу, если есть возможность лучше спрятать его в столб. Если на вершине столба имеется декоративная «шляпка» выводите провод на лицевую плоскость столба прямо под «шляпкой».
Далее идет разводка кабелей фотоэлементов. Именно этот этап вызывает наибольшие затруднения, поэтому остановимся на нем подробнее. Проводку для фотоэлементов лучше всего выполнить «домофонным сигнальным кабелем» 4х0,22. Годится также вышеупомянутый ПВС 2х0.5, только не забудьте, что ближнему к приводу фотоэлементу требуется 4 жилы, а дальнему 2.
Первое, что вызывает затруднения это где устанавливать фотоэлементы. Фотоэлементы устанавливаются в торцах столбов, на одинаковой высоте 500-600мм от земли. См фото:

Ближний к электроприводу фотоэлемент (приемник, RX) требует 4-х жильного провода — 2 жилы питание, и еще 2 управляющие контакты. На схеме этот провод обозначен 4х0,35. Он идет от столба к приводу, Часто забывают, что нужен 4-х жильный кабели и кладут 2-х жильный, будьте внимательны. Этот кабель при возможности лучше спрятать в столб, оставив свободный конец 15-20 см. Если нет такой возможности нужно укрепить провод на столбе, благо крепежа для провода сейчас хватает. Часто этот провод прокладывают в швах между кирпичами, а потом заделывают раствором.
Фотоэлемент на дальнем от привода столбе (ТХ) требует 2-х жильного кабеля, на схеме он обозначен 2х0,35. Проводку лучше сделать опять же тем же самым сигнальным проводом 4х0,22, можно использовать 2 жилы, а можно использовать все жилы скрутив их попарно. Провод этого фотоэлемента проходит под проемом, поэтому предусмотрите, чтобы он был надежно защищен, ведь сверху будет проезжать автотранспорт.
Остались вопросы? Звоните, и наши менеджеры с удовольствием проконсультируют Вас по всем вопросам! Звоните или закажите консультацию.
Проконсультироваться
Желаем успехов!
Монтаж привода для откатных ворот своими руками
Монтаж привода для откатных ворот своими руками — наши статьи
Производство и
установка ворот
Наш адрес: г. Москва,
41 км. МКАД, ТК «Славянский мир»
Работаем ежедневно:
с 9.00 до 18.00
При выборе ворот для защиты своего участка от вторжения посторонних лиц все чаще люди выбирают откатные ворота. Обусловлено это их высокой надежностью, функциональностью и доступностью. Причем есть возможность установить автоматику, которая облегчит эксплуатацию конструкции. С помощью автоматики можно управлять воротами, не покидая салон своего транспортного средства, что особо актуально во время сильной непогоды.
Конструкция
Разные марки и модели электропривода могут отличаться друг от друга, но основные комплектующие и принцип действия практически у всех одинаковый.
 Электродвигатель. Силовой агрегат, который используется для превращения электроэнергии в механическую энергию.
Электродвигатель. Силовой агрегат, который используется для превращения электроэнергии в механическую энергию.- Редуктор. Данное оборудование позволяет снизить скорость вращения и передачи движения электродвигателя.
- Зубчатая рейка. Совместно с шестерней редуктора формирует зубчатую передачу. Через редуктор движение передается от двигателя на шестерню, а потом на саму зубчатую рейку. А так как она зафиксирована на направляющей балке с воротной створкой, то при ее движении полотно тоже сдвигается в сторону. Обычно она не входит в комплект автоматики и ее приобретают отдельно.
- Блок управления. Позволяет запустить двигатель вручную, нажав кнопку.
- Приемник. Ловит сигнал от пульта ДУ, а затем дает команду на включение электрического привода.
 Электродвигатель. Силовой агрегат, который используется для превращения электроэнергии в механическую энергию.
Электродвигатель. Силовой агрегат, который используется для превращения электроэнергии в механическую энергию.На заметку! Пульт дистанционного управления не всегда входит в комплект приобретенной автоматики, иногда его приходится приобретать отдельно. Необходимо сразу выяснить этот вопрос при покупке.
Установка
Покупая электропривод первым делом всегда следует обращать внимание на его мощность. Чем больше весят ворота, тем мощнее должна быть автоматическая система.
Монтажные работы проводятся следующим образом:
- Привод. Его устанавливают между тележками для роликов, после чего производят разметку. В намеченных точках нужно просверлить отверстия для крепежа. Делают это при помощи четырех анкерных болтов, установленных по углам основания. Электропривод обязан располагаться параллельно воротной створке.
- Зубчатая рейка. Во время монтажных работ створка ворот должна быть открыта. Рейку располагают на шестерню электропривода, чтобы между зубцами был зазор равный миллиметру. Затем ее немного прихватывают к консольной балке при помощи сварки. Потом приваривают последующую рейку. Причем между рейками не должны быть разрывы. Зубчатая рейка должна быть по всей длине консольной балки. Проверяем ее на зазоры, при их отсутствии заново повторяем процесс варки.
- Концевые выключатели. Применяют для остановки электропривода в автоматическом режиме, после того как он прошел некую часть зубчатой рейки. Тогда полотно прекратит движение при эксплуатации. Во время монтажа помните, что такие выключатели делят на левый и правый. По этой причине один из них должен быть повернут к электроприводу минусом, а другой — плюсом.
 Привод. Его устанавливают между тележками для роликов, после чего производят разметку. В намеченных точках нужно просверлить отверстия для крепежа. Делают это при помощи четырех анкерных болтов, установленных по углам основания. Электропривод обязан располагаться параллельно воротной створке.
Привод. Его устанавливают между тележками для роликов, после чего производят разметку. В намеченных точках нужно просверлить отверстия для крепежа. Делают это при помощи четырех анкерных болтов, установленных по углам основания. Электропривод обязан располагаться параллельно воротной створке.В конце необходимо подключить автоматику к сети. Делать все нужно строго по схеме, которая приложена к оборудованию.
Узнайте стоимость своих ворот прямо сейчас!
Перезвоним и поможем Вам с выбором, подберем наилучшее решение и изготовим ворота в короткие сроки!
×Расчитать и оформить
установка привода и устройств безопасности
Откатные ворота с автоматикой — это одностворчатый портал, отъезжающий в одну из сторон за счет электромеханического привода. Принцип работы заключается в работе самоблокирующегося редуктора и модуля управления с радиоприемником. Управление остановкой привода в концевых положениях гарантирует оптимальную безопасность, надежно позиционируя стоп-точки движения створки.

Электрический привод
Для электропитания редуктора достаточно сети 230В и частотой 50Гц. В отсутствие напряжения, привод можно разблокировать, и выполнять открывание и закрывание ворот вручную.
Руководство по установке привода
Подготовительный этап
Перед началом действий по монтажу привода необходимо, чтобы были выполнены такие условия и мероприятия:
- Ворота крепкие, и пригодные к автоматизации: движение створки легкое и равномерное, траектория движения строго горизонтальная, наличие механических стопоров на концах балки во избежание выхода створки за эксплуатационные пределы;
- Усилие для движения створки равно менее, чем половине максимальной тяговой силы приобретенного двигателя;
- Место заливки фундамента прочное и стабильное, без труб и кабелей;
- В наличии пространство вокруг привода для безопасной ручной разблокировки устройства;
- Электрическая сеть питания оборудована заземлением, кабельные трубы соответствуют техническим нормам пожаробезопасности.
Обустройство железобетонной основы
Фундамент под откатные ворота представляет собой глубоко заглубленную бетонную ленту с армирующим поясом. На монтажное основание устанавливают болты, и фиксируют их гайками. Помните про горизонтальность и строгую параллельность створке ворот. Монтажное основание немного вдавливают (топят) в фундаменте, предварительно заложив в основании футляры для электрических кабелей.

Схема бетонирования
В конце очистите поверхность монтажной основы от следов цемента и других стройматериалов. Подождите 7-14 дней, пока бетон застынет и затвердеет.
Установка привода
Автоматика на откатные ворота – это в первую очередь работа привода, который следует устанавливать согласно инструкции производителя. Общая схема представляет собой:
- Подкручивание вверх гайки (поднятие) для регулировки положения редуктора над основанием.
- Установка 2 пластин на фундаментные болты, и выравнивание их между собой при помощи нивелира, как по горизонтали, так и по вертикали.
- Снимите крышку и пропустите электрокабель через особое отверстие в приводе. Заложите шайбы и закрепите двигатель, затянув гайки.

Общий план подключения конструкции
Важно! Не поднимайте приводящее устройство за крышку или корпус. Сняв крышку для электромонтажных работ, обеспечьте защиту от попадания влаги и посторонних предметов. Завершив установку и наладку эксплуатации, закрепите все снятые элементы обратно на место!
Фиксация зубчатой рейки
Корректная фиксация зубчатой рейки — важное условие безопасной и бесшумной работы всей конструкции. Сначала устанавливают на секции такие принадлежности из комплекса, как болты и гайки (в центре отверстий на рейке), которые обеспечат в дальнейшем регулировку положения. Затем помещают 1-ю секцию зубчатой рейки на шестерню корпуса мотора, прижимают крепежные втулки к полотну створки. Выдерживая зазор между рейкой и шестерней приблизительно 2-3 мм, закрепляют зубчатую планку равномерно на воротах.

Монтаж зубчатой рейки
Намечают места закрепления 2-й секции, и фиксируют ее на створке. Последующие секции зубчатой рейки монтируют аналогично до полного обхвата створки. Лишнюю часть в конце отрезают.
Работа выполнена хорошо, если при ручном движении портала шестерня находится в сцеплении с зубчатой рейкой, и обеспечен необходимый зазор.
Подключение привода
Монтаж автоматики на откатные ворота и разводка начинается с разблокировки привода. Проверяют, чтобы в открытом положении срабатывал выключатель конечного положения — на модуле управления должен погаснуть светодиод «OP.L», а в закрытом — светодиод «CL.L».

Блок управления воротами
Поставьте створку портала в промежуточное положение, и заблокируйте привод. Подайте команду управления движение створки в необходимом направлении, при открытии должна быть индикация «  », при закрытии «
», при закрытии «  ». Если не совпадает с вышеописанным, то следует поменять местами провода на клеммах, обозначенных L1 и L2, заранее обесточив проводку.
». Если не совпадает с вышеописанным, то следует поменять местами провода на клеммах, обозначенных L1 и L2, заранее обесточив проводку.

Схема подключение к модулю управления
Режимы управления движением разделяют на:
- Нормально-открытый контакт — пошаговый режим управления движением, соответствующий последовательности «Открыть — Стоп – Закрыть – Стоп», и так далее. Для этого к модулю управления подключают кнопки и выключатели контактов радиоприемника, пошагово подводя к клеммам SBS и . Первая команда (к примеру, после включения) от устройства управления должна выполнять открытие ворот.
- Нормально-открытый контакт — режим частичного открытия, например, для пешеходного прохода. Частичное открытие ворот на 0,8м — 2,4 м возможно при установке времени частичного открытия в настройках модуля управления. Подключая устройство управления, частичным открытием производят к клеммами PED и , при том, что команда выполняется лишь при условии полного закрытия ворот.
- Нормально-закрытый контакт — управление остановкой движения. Подключение устройств производить к клеммам S и , установив перемычку.
 . Первая команда (к примеру, после включения) от устройства управления должна выполнять открытие ворот.
. Первая команда (к примеру, после включения) от устройства управления должна выполнять открытие ворот. , при том, что команда выполняется лишь при условии полного закрытия ворот.
, при том, что команда выполняется лишь при условии полного закрытия ворот. , установив перемычку.
, установив перемычку.
Электронный модуль управления
Подключение устройств безопасности
Фотоэлементы
Чтобы обеспечить защиту от защемления воротами, к центру управления подключают 1-2 пары фотоэлементов. Выходная цепь приемника, обозначенная RX1, для фотоэлементов закрытия обычно подведена к клеммам Ph2 и  , приемника RX2 – открытия к Ph3 и
, приемника RX2 – открытия к Ph3 и  . Цепи питания (RX1 и RX2) подсоединяют к клеммам +24 V и
. Цепи питания (RX1 и RX2) подсоединяют к клеммам +24 V и  . Если Вы решили поставить несколько пар, то последовательно соедините их друг с другом в выходной цепи, и параллельно кабелю питания.
. Если Вы решили поставить несколько пар, то последовательно соедините их друг с другом в выходной цепи, и параллельно кабелю питания.
В зависимости от функции, фотоэлементы должны быть позиционированы: при закрытии срабатывает фотоэлемент и вызывает остановку, а затем полное открытие; фотоэлемент закрытия в полностью открытом положении вызывает сброс количества времени паузы, и автоматически закрывает ворота.

Фотоэлементы Professional
Проблесковая лампа
Необходима для сигнализации про движение створки и передачи на модуль управления привода.
Технические параметры питания — 230В, максимум 100Вт. Лампа может работать в 2 режимах – без и с предварительным миганием. Её надо подключить к клеммам LAMP и N1.
Программирование пультов

Пульт радиоуправления
Для того, чтобы прописать пульт, нажмите клавишу Learn (индикатор LR загорается), и выберите любую кнопку пульта (LR гаснет). Опять нажмите туже кнопку — индикатор LR должен моргнуть несколько раз и погаснуть. Это значит, что код записан радиоприемнику в память в модуле управления. Чтобы стереть коды, удерживайте Learn в течение 15 сек, пока не погаснет индикатор LR.
Важно знать! В случае утери пульта, во избежание проникновений, обязательно сотрите все коды из памяти и заново запрограммируйте все пульты.
Видео инструкция установки электроворот
Источник: http://rusograda.ru/vorota/otkatnye-vorota-s-avtomatikoj
Откатные ворота: схема подключения автоматики
Компания «Русская Ограда». Мы занимаемся установкой заборов, ворот (в том числе автоматических), установкой столбов и линий ЛЭП по всей Москве и Московской области. Звоните: +7 (495) 762-97-99 c 09:00 до 21:00 ежедневно.
Если Вы счастливый обладатель современных откатных ворот, к примеру, из профнастила, то рано или поздно Вам захочется автоматизировать устройство, чтобы не приходилось выходить из машины и вручную открывать его. Тем более, что откатные ворота, схема подключения которых основана на установке электропривода и заводского комплекта фурнитуры, вполне выполнима своими руками.
Инструкция по автоматизации
Подготовительный этап
Для того, чтобы сделать откатные ворота автоматическими, необходимо подготовить инструменты и приобрести комплект автоматики, в него обычно входит:
- Электропривод сдвижных ворот;
- Зубчатая рейка;
- Комплектующие безопасности — фотоэлементы и сигнальная лампа;
- Болты и другие крепежные элементы;
- Пульт дистанционного управления.
Также необходимы следующие инструменты и материалы:
- Сварочный аппарат;
- Для поведения питания к электроприводу провод сечением 2Х1,5 мм или 2Х2 мм, для фотоэлементов — два провода 4Х0,5 мм и 2Х0,5 мм, для сигнальной лампы — провод на 220В 2Х0,5 мм.
- Дрель, набор сверл по металлу, саморезы и прочее.
Установка привода
Приводы откатных ворот обычно закрепляют на швеллере, где уже расположены две роликовые каретки. Сначала надо выбрать место, где будет установлен электропривод, для этого берут монтажное основание из набора, и устанавливают на нём привод. Затем устанавливают его на швеллер между роликовыми каретками чуть ближе к проему, воссоздавая рабочее положение автоматики.
Монтаж привода
Важно! Чтобы подобрать правильное месторасположение — положите на шестерню привода зубчатую рейку – и смотрите, как и куда следует подвинуть его, чтобы зубчатая рейка располагалась посередине шестерни. Далее закрепит профильную трубу наружного каркаса, но никак не направляющий рельс!
На намеченное место кладем привод на монтажное стальное основание, и обвариваем его сваркой со всех сторон. Снимите крышку корпуса и проденьте шнур через отверстие. После этого можно зафиксировать на нем привод с помощью болтов.
Продевание провода
Крепление зубчатой рейки
В полностью открытом положении створки поставьте по центру шестерни зубчатую рейку, учитывая, что должен остаться достаточный отрезок для крепежа концевиков (концевых выключателей). Приварите к профильной трубе внешнего каркаса створки крепежные детали зубчатой рейки и протяните ворота. Поставьте второй отрезок зубчатой рейки и повторите процедуру. Следите, чтобы между стыками получился «полноценный» зуб. После прихватки по периметру можно еще раз обварить все крепежные элементы.
Образование «целого зуба» рейки
Затем оставьте зазор в 1-2 мм между рейкой и шестерней электропривода. Для этого отвинтите болты на зубчатой рейке и выставьте ее так, чтобы в движении рейка, соприкасаясь с шестерней, издавала характерное «цоканье».
Установка концевых выключателей
Концевые выключатели необходимо закрепить на зубчатой рейке болтовыми соединениями. Они бывают двух типов:
- Магнитные концевики надежны в эксплуатации в любую погоду, так как их принцип действия заключается в полярности магнита. Концевые выключатели разделяются на левый и правый, и должны быть расположены так, чтобы один был плюсом к приводу, а другой минусом. Их располагают недалеко друг от друга, подбирая место, пока устройство не сработает.
- Механические — более распространенный тип, который более прост в монтаже. Принцип работы: проходя через препятствие, пружинка на приводе сгибается в бок и движение останавливается.
Механический концевик
Подключение привода
Электропривод следует подключать к источнику питания по схеме, приложенной инструкции. Чаще всего «AC-L» – это фаза, «АС-N» – ноль через автомат.
Перед завершающим этапом монтажных работ тестируют и проверяют работу привода. Нажимая кнопку на пульте управления, электропривод должен сдвигать створку ворот, однако не до конца.
Необходимо время для открывания и закрывания. Для этого при полностью закрытых воротах нажмите клавишу «Р1» или «STOP» и «PP» на 2-3 секунды, или 3 раза в зависимости от модели (подробности должны быть указаны в инструкции). Так Вы зададите полный цикл открытия и закрытия (конечных положений) и запишите время в память привода. Это будет дополнительным способом остановки, если по какой-либо причине не сработают концевые выключатели, то действие автоматически отключится по времени, отведенному на него.
Установка фотоэлементов
Фотоэлементы — это парный прибор, где первый подает световой сигнал –луч, а другой его принимает. Когда луч прерывается препятствием на пути — автомобилем, собакой, человеком и т.д. ворота начинают двигаться назад.
Существует несколько способов установки фотоэлементов откатных ворот, главное условие — расположение их друг напротив друга для принятия светового сигнала:
- Можно зафиксировать фотоэлементы на столбиках, где расположены нижний улавливатель;
- Сделать специальные металлические постаменты и приварить к несущим столбам;
- Организовать небольшие столбики из профилированной трубы сечением 50Х50, и на них вмонтировать фотоэлементы.
Выбирайте способ, исходя из Вашей частной ситуации на объекте. Фиксируют фотоэлементы на металлической основе обычными саморезами. Для их подключения снимите перемычку между «GND» и «PHOTO», и по схеме:
- Контакт «-» подключите к левому контакту «АС24V» блока управления;
- «+» подключите к правому контакту «АС24V» блока управления;
- «NC» подключите к контакту «GND» также на блоке управления;
- «OUT» к контакту «PHOTO».
Подключение сигнальной лампы
Комплектующую фурнитуры сигнальную лампу обычно располагают сбоку проезжей части для информирования проезжающего автомобиля о выезде транспорта со двора.
Конечно, личное дело каждого, устанавливать такой элемент безопасности, как сигнальная лампа, или нет. Однако профессионалы рекомендуют полностью выполнять все условия безопасности.
Закрепите сигнальную лампу с помощью саморезов и подведите провод сечением 2Х0,5 мм, подключите к контактам на плате управления «АС-N» и «LIGHT».
Обустройство автоматизированного сдвижного проема
Что такое привод переменного тока? Работа и типы электрических приводов и VFD
Что такое электрические приводы переменного тока? Классификация приводов переменного тока и частотно-регулируемых приводов
Электрические приводы являются неотъемлемой частью промышленных процессов и процессов автоматизации, особенно там, где точный контроль скорости двигателя является основным требованием. Кроме того, все современные электропоезда или локомотивы приводились в действие электрическими приводами. Робототехника — еще одна важная область, в которой приводы с регулируемой скоростью обеспечивают точное управление скоростью и положением.
Что такое привод постоянного тока? Работа и типы приводов постоянного тока
Даже в нашей повседневной жизни мы можем найти так много приложений, в которых приводы с регулируемой скоростью (или приводы с регулируемой скоростью) используются для выполнения широкого спектра функций, включая управление электробритвами, компьютерное периферийное управление, автоматическая работа стиральных машин и так далее. 
Что такое электропривод?
Привод управляет скоростью, крутящим моментом и направлением движущихся объектов.Приводы обычно используются для приложений управления скоростью или движением, таких как станки, транспорт, роботы, вентиляторы и т. Д. Приводы, используемые для управления электродвигателями, известны как электрические приводы .
Приводы могут быть постоянного или переменного типа. Приводы с постоянной скоростью неэффективны для операций с переменной скоростью; в таких случаях приводы с регулируемой скоростью используются для управления нагрузками в любом из широкого диапазона скоростей. 
Зачем нужны электрические приводы?
Приводы с регулируемой скоростью необходимы для точного и непрерывного управления скоростью, положением или крутящим моментом различных нагрузок.Наряду с этой важной функцией есть много причин использовать приводы с регулируемой скоростью. Некоторые из них включают
- Для достижения высокой эффективности: электрические приводы позволяют использовать широкий диапазон мощности, от милливатт до мегаватт для различных скоростей, и, следовательно, общие затраты на эксплуатацию системы снижаются.
- Для увеличения скорости точности остановки или реверсирование двигателя
- Для управления пусковым током
- Для обеспечения защиты
- Для установки расширенного управления с изменением таких параметров, как температура, давление, уровень и т. д.
Развитие силовых электронных устройств, микропроцессоров и цифровой электроники привело к разработке современных электроприводов, которые являются более компактными, эффективными, дешевыми и имеют более высокие характеристики, чем громоздкие, негибкие и дорогие традиционные электрические приводные системы, в которых используется система из нескольких машин. для производства переменной скорости.
Блок-схема электропривода переменного тока
Компоненты современной системы электропривода показаны на рисунке ниже.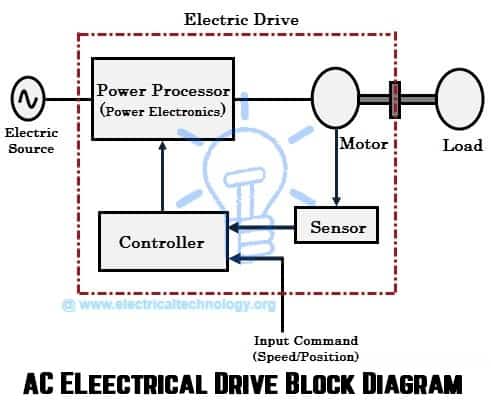 На приведенной выше блок-схеме системы электропривода электродвигатель, силовой процессор (силовой электронный преобразователь), контроллер, датчики (например, ПИД-регулятор) и фактическая нагрузка или устройство показаны как основные компоненты, включенные в привод.
На приведенной выше блок-схеме системы электропривода электродвигатель, силовой процессор (силовой электронный преобразователь), контроллер, датчики (например, ПИД-регулятор) и фактическая нагрузка или устройство показаны как основные компоненты, включенные в привод.
Электродвигатель — это основной компонент электрического привода, который преобразует электрическую энергию (направляемую процессором мощности) в механическую энергию (приводящую в движение нагрузку). Двигатель может быть двигателем постоянного или переменного тока в зависимости от типа нагрузки.
Силовой процессор также называется силовым модулятором, который, по сути, является силовым электронным преобразователем и отвечает за управление потоком мощности к двигателю, чтобы обеспечить работу двигателя с переменной скоростью, реверсом и торможением. Силовые электронные преобразователи включают преобразователи AC-AC, AC-DC, DC-AC и DC-DC.
Контроллер сообщает процессору питания, сколько мощности он должен генерировать, предоставляя ему опорный сигнал после рассмотрения входной команды и входных сигналов датчиков.Контроллер может быть микроконтроллером, микропроцессором или процессором DSP.
Привод переменной скорости, используемый для управления двигателями постоянного тока, известен как приводы постоянного тока , а приводы переменной скорости, используемые для управления двигателями переменного тока, называются приводами переменного тока . В этой статье мы поговорим о приводах переменного тока.
Классификация приводов переменного тока
Приводы переменного тока используются для привода двигателей переменного тока, особенно трехфазных асинхронных двигателей, потому что они преобладают над другими двигателями в большинстве отраслей промышленности.В промышленных терминах привод переменного тока также называют частотно-регулируемым приводом (VFD), приводом с регулируемой скоростью (VSD) или приводом с регулируемой скоростью (ASD).
Несмотря на то, что существуют различные типы частотно-регулируемых приводов (или приводов переменного тока), все они работают по тому же принципу, что и преобразование фиксированного входного напряжения и частоты в переменное выходное напряжение и частоту. Частота привода определяет, насколько быстро двигатель должен работать, в то время как комбинация напряжения и частоты определяет величину крутящего момента, который двигатель должен генерировать.
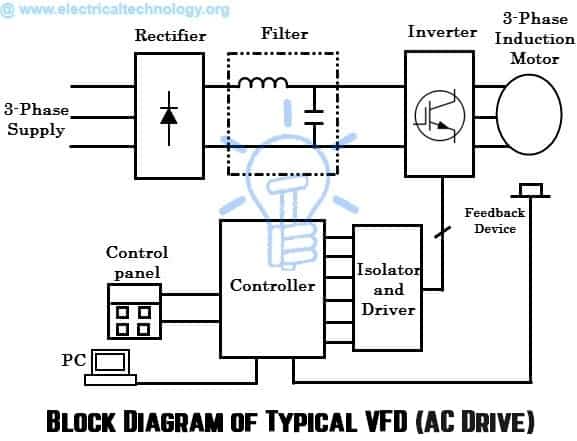
ЧРП состоит из силовых электронных преобразователей, фильтра, центрального блока управления (микропроцессора или микроконтроллера) и других датчиков. Блок-схема типичного ЧРП показана ниже.
Блок-схема привода переменного тока (типовой частотно-регулируемый привод)
Конструкция и детали типового привода переменного тока с частотно-регулируемым приводом
Различные секции частотно-регулируемого привода (VFD) включают выпрямитель
а секция фильтра преобразует мощность переменного тока в мощность постоянного тока с незначительной пульсацией.В основном выпрямительная секция сделана из диодов, которые выдают неконтролируемый выход постоянного тока. Затем секция фильтра удаляет рябь и создает постоянный постоянный ток из пульсирующего постоянного тока. В зависимости от типа питания количество диодов определяется выпрямителем. Например, если это трехфазный источник питания, требуется минимум 6 диодов, и поэтому он называется шестиимпульсным преобразователем.
Инвертор забирает мощность постоянного тока из выпрямительной секции, а затем преобразует обратно в мощность переменного тока переменного напряжения и переменной частоты под управлением микропроцессора или микроконтроллера.Эта секция состоит из ряда транзисторов, IGBT, SCR или MOSFET, и они включаются / выключаются сигналами от контроллера. В зависимости от включения этих силовых электронных компонентов определяется мощность и, в конечном итоге, скорость двигателя.
Контроллер выполнен с микропроцессором или микроконтроллером и принимает входные данные от датчика (в качестве задания скорости) и задание скорости от пользователя и соответственно запускает силовые электронные компоненты для изменения частоты источника питания.Он также выполняет отключение при повышении и понижении напряжения, коррекцию коэффициента мощности, контроль температуры и подключение к ПК для мониторинга в реальном времени.
Принцип работы частотно-регулируемого привода (VFD)
Мы знаем, что скорость асинхронного двигателя пропорциональна частоте источника питания ( N = 120f / p ), и, изменяя частоту, мы может получить переменную скорость. Но когда частота уменьшается, крутящий момент увеличивается, и, следовательно, двигатель потребляет большой ток.Это, в свою очередь, увеличивает магнитный поток в двигателе. Также магнитное поле может достигать уровня насыщения, если не снижать напряжение питания.
Следовательно, и напряжение, и частота должны изменяться в постоянном соотношении, чтобы поддерживать поток в рабочем диапазоне. Поскольку крутящий момент пропорционален магнитному потоку, крутящий момент остается постоянным во всем рабочем диапазоне v / f. 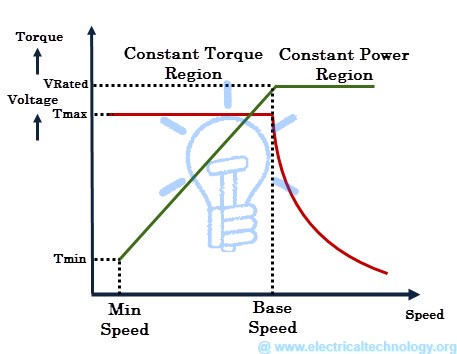 На приведенном выше рисунке показано изменение крутящего момента и скорости асинхронного двигателя для регулирования напряжения и частоты.На рисунке напряжение и частота изменяются с постоянным соотношением до базовой скорости. Таким образом, магнитный поток и, следовательно, крутящий момент остаются почти постоянными до базовой скорости. Эта область называется областью постоянного крутящего момента.
На приведенном выше рисунке показано изменение крутящего момента и скорости асинхронного двигателя для регулирования напряжения и частоты.На рисунке напряжение и частота изменяются с постоянным соотношением до базовой скорости. Таким образом, магнитный поток и, следовательно, крутящий момент остаются почти постоянными до базовой скорости. Эта область называется областью постоянного крутящего момента.
Так как напряжение питания может быть изменено только до номинального значения и, следовательно, скорость при номинальном напряжении является базовой скоростью. Если частота увеличивается сверх базовой скорости, магнитный поток в двигателе уменьшается, и, таким образом, крутящий момент начинает падать. Это называется областью ослабления потока или постоянной мощности.
Этот тип управления называется методом постоянного напряжения / частоты и используется в частотно-регулируемых приводах (ЧРП), и это самый популярный тип управления в промышленности. Предположим, асинхронный двигатель подключен к источнику питания 460 В, 60 Гц, тогда соотношение будет 7,67 В / Гц (как 460/60 = 7,67). Пока это соотношение сохраняется пропорционально, двигатель развивает номинальный крутящий момент и регулируемую скорость.
Схемы управления частотно-регулируемым приводом
Существуют различные методы управления скоростью, реализованные для частотно-регулируемых приводов.Ниже приводится основная классификация методов управления, используемых в современных ЧРП.
- Скалярное управление
- Векторное управление
- Прямое управление крутящим моментом
Скалярное управление
В этом случае величины напряжения и частоты контролируются путем поддержания постоянного отношения v / f и, следовательно, называются скалярным управлением (скалярные значения определяет скорость и крутящий момент). На двигатель подаются сигналы переменного напряжения и частоты, генерируемые ШИМ-управлением от инвертора.
Инвертором можно управлять с помощью микроконтроллера, микропроцессора или любого другого цифрового контроллера в зависимости от типа производителя. Эта схема управления широко используется, поскольку для управления скоростью требуется небольшое знание двигателя. Скалярное управление может быть реализовано несколькими способами, и некоторые из популярных схем включают
Синусоидальный ШИМ
В этом методе частота переключателя изменяется в зависимости от входного задания скорости и среднего или среднеквадратичного значения напряжение для этой частоты определяется количеством импульсов и шириной импульсов.Если ширина импульса изменяется, напряжение на двигателе также изменяется. Это напряжение создает через двигатель синусоидальный ток, который намного ближе к истинной синусоиде.
Для реализации этого метода требуются лишь небольшие вычисления. Однако этот метод имеет недостатки, заключающиеся в том, что он включает гармоники при скорости переключения ШИМ, а также величина основного напряжения менее 90%. 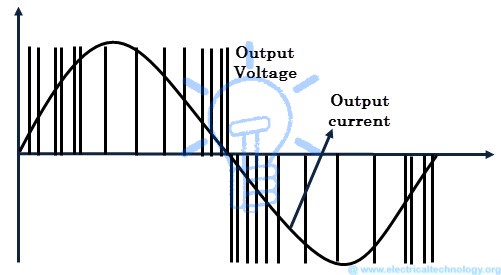 В этом методе синусоидальные взвешенные значения сохраняются в микроконтроллере или микропроцессоре и становятся доступными на выходном порту через определенные пользователем интервалы, которые затем подаются на инвертор для обеспечения переменного питания двигателя.
В этом методе синусоидальные взвешенные значения сохраняются в микроконтроллере или микропроцессоре и становятся доступными на выходном порту через определенные пользователем интервалы, которые затем подаются на инвертор для обеспечения переменного питания двигателя.
Шестиступенчатый ШИМ
В этом методе инвертор VFD имеет шесть различных состояний переключения, и они переключаются в определенном порядке, чтобы обеспечить переменное напряжение и частоту для двигателя. Изменение направления вращения двигателя легко достигается путем изменения последовательности фаз на выходе инвертора с помощью угла включения.
Этот метод можно легко реализовать, так как не требуется промежуточных вычислений, а также величина основного напряжения больше, чем у шины постоянного тока.Однако в этом методе высоки гармоники низшего порядка, которые не могут быть отфильтрованы индуктивностью двигателя, и, следовательно, это приводит к большим потерям, рывкам и пульсации крутящего момента.
ШИМ с пространственной векторной модуляцией (SVPWM)
В этом методе три вектора фазного напряжения асинхронного двигателя преобразуются в один вращающийся вектор. Инвертор VFD может быть переведен в восемь уникальных состояний. Напряжение ШИМ на нагрузку достигается путем правильного выбора состояний переключателя инвертора и расчета соответствующего периода времени для каждого состояния.
При использовании преобразования пространственного вектора для каждого состояния генерируются три фазовых синусоидальных волны, которые затем применяются к двигателю.
Основным преимуществом этого метода является то, что величина гармоники меньше на частоте переключения ШИМ. Однако для использования этого метода требуются дополнительные вычисления.
Векторное управление
Этот метод также называется управлением, ориентированным на поток, управлением, ориентированным на поле, или косвенным управлением крутящим моментом. При этом три вектора фазного тока преобразуются в двумерную вращающуюся систему отсчета (d-q) из трехмерной системы отсчета с использованием преобразования Кларка-Парка.Компонент «d» — это составляющая, создающая магнитный поток, в токе статора, а составляющая «q» — составляющая, создающая крутящий момент. 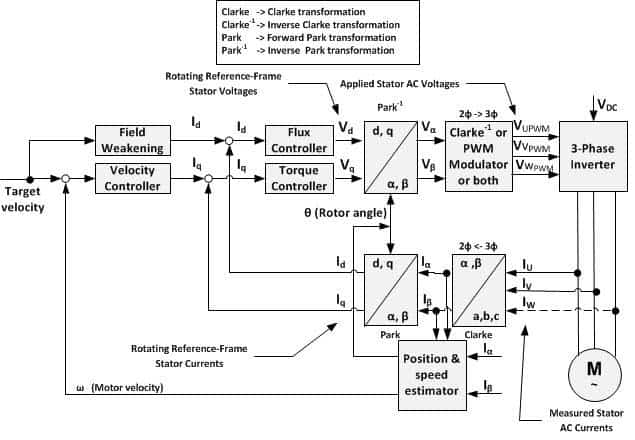 Эти два компонента управляются независимо через отдельный ПИ-регулятор, а затем выходы ПИ-регуляторов преобразуются обратно в трехмерную стационарную базовую плоскость с использованием обратного преобразования Кларка-Парка.
Эти два компонента управляются независимо через отдельный ПИ-регулятор, а затем выходы ПИ-регуляторов преобразуются обратно в трехмерную стационарную базовую плоскость с использованием обратного преобразования Кларка-Парка.
Используя метод пространственно-векторной модуляции, соответствующее переключение является широтно-импульсной модуляцией. Различные типы методов векторного управления включают управление, ориентированное на поток статора, управление, ориентированное на поток ротора, и управление, ориентированное на поток намагничивания.
Векторное управление дает лучший отклик крутящего момента и точное управление скоростью по сравнению со скалярным управлением. Но для этого требуется сложный алгоритм расчета скорости, и он дороже по сравнению со скалярным управлением из-за устройств обратной связи.
Прямое управление крутящим моментом
Этот метод не имеет фиксированной схемы переключения по сравнению с традиционным векторным управлением. Он переключает инвертор в соответствии с потребностями нагрузки. Этот метод обеспечивает высокий отклик, особенно при изменении нагрузки из-за отсутствия фиксированной схемы переключения.Это исключает использование какой-либо обратной связи, хотя обеспечивает точность скорости до 0,5%. В этом методе используется адаптивная моторная модель, которая основана на математических выражениях базовой моторной теории. 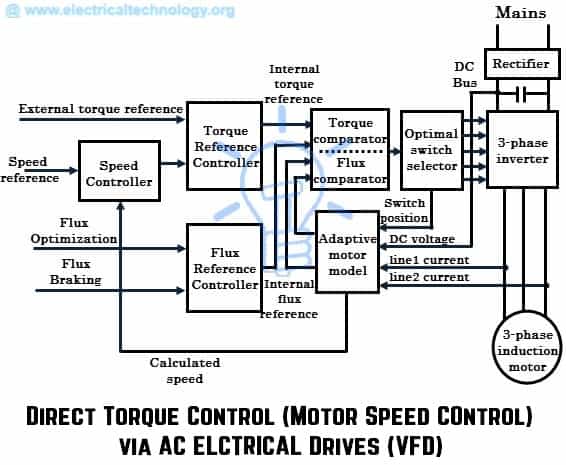 Для этой модели требуются основные параметры двигателя, такие как сопротивление статора, коэффициент насыщения, взаимная индуктивность и т. Д., И алгоритм фиксирует эти данные без вращения двигателя. Эта модель вычисляет фактический крутящий момент и магнитный поток двигателя, учитывая такие входные данные, как напряжение шины постоянного тока, положение переключателя тока и линейные токи.Затем эти значения передаются на два компаратора уровня крутящего момента и магнитного потока.
Для этой модели требуются основные параметры двигателя, такие как сопротивление статора, коэффициент насыщения, взаимная индуктивность и т. Д., И алгоритм фиксирует эти данные без вращения двигателя. Эта модель вычисляет фактический крутящий момент и магнитный поток двигателя, учитывая такие входные данные, как напряжение шины постоянного тока, положение переключателя тока и линейные токи.Затем эти значения передаются на два компаратора уровня крутящего момента и магнитного потока.
Выходными данными компараторов являются опорные сигналы крутящего момента и магнитного потока, которые передаются в таблицу выбора переключателя, в которой выбранное положение переключателя применяется к инвертору без какой-либо модуляции. Отсюда и название «прямое управление крутящим моментом», поскольку крутящий момент и магнитный поток двигателя становятся напрямую управляемыми переменными.
Приводы переменного тока в реальном времени: краткий обзор
Несколько расширенных функций приводов переменного тока или (VFD) делают их экономичным выбором для приложений с регулируемой скоростью.Такие функции, как дизайн корпуса, аналоговые входы / выходы, цифровые входы / выходы, многофункциональные клавиатуры и технология IGBT, позволяют легко настроить VFD для любого приложения.
В настоящее время большинство приводов переменного тока более компактны из-за использования микропроцессоров, IGBT, а также технологии поверхностного монтажа (например, резисторов SMD) для сборки компонентов. Эти блоки могут быть настенными или отдельно стоящими приводами. Существуют различные приводы от разных производителей, включая ABB, AB, Siemens, Delta и так далее.Ниже показаны различные пакеты приводов переменного тока ABB. 
По сути, настройка привода переменного тока для приложения включает три основных этапа, а именно: управляющую проводку, силовую проводку и программирование программного обеспечения. После подключения силовой и управляющей проводки мы должны настроить параметры привода переменного тока в соответствии с требованиями приложения с помощью программного обеспечения, съемной клавиатуры или удаленной панели оператора.
Нет необходимости переподключать привод, если приложение было изменено.Настройка для новых приложений выполняется просто путем изменения функций привода в программе. Приводы переменного тока
имеют аналоговые входы (например, задание скорости), аналоговые выходы (для вспомогательного измерения), цифровые входы (например, пуск, останов, реверс и т. Д.) И релейные выходы (реле скорости, реле неисправности и т. Д.) в секции проводки управления. Этот раздел контролируется специальным программным обеспечением, которое называется состоянием ввода-вывода, которое отслеживает и отображает входы и выходы привода. 
В обычных приводах панели программирования или сенсорные клавиатуры прикреплены к самому приводу.Современные приводы состоят из съемных панелей программирования, которые позволяют пользователю программировать, перемещаться по различным функциям и настраивать привод в соответствии с требованиями приложения.
Помимо ручных инструментов, каждый привод переменного тока поставляется со специальным программным обеспечением, которое упрощает запуск и обслуживание. Этот инструмент состоит из мастеров настройки для настройки параметров. Программный инструмент позволяет просматривать, редактировать, сохранять и загружать параметры в привод. Он также обеспечивает графический и числовой мониторинг сигналов.
При проектировании производители устанавливают для параметров привода переменного тока значения по умолчанию. Таким образом, оператору необходимо загрузить значения данных двигателя и значения, чтобы настроить привод для приложения. В дополнение к значениям по умолчанию производители также предоставляют макросы, которые представляют собой не что иное, как заранее запрограммированный набор значений.
Пользователь или оператор может установить и настроить все параметры, включенные в макросы, за несколько секунд, вместо того, чтобы настраивать все параметры по отдельности, что может занять несколько минут.Эти макросы включают трехпроводное управление, ручной автоматический режим, ПИД-регулирование и регулирование крутящего момента.
Макрос управления пропорционально-интегрально-производной (ПИД) позволяет приводу автоматически управлять скоростью, получая управляющие входные данные, такие как давление, температура или уровень в резервуаре. При правильном программировании параметров аналогового и цифрового ввода / вывода с помощью макроса ПИД-регулирования достигается работа привода с обратной связью.
Приводы переменного токаимеют подключаемую опцию управления полевой шиной для подключения к основным автоматизированным системам, таким как ПЛК, ПК, PAC, системы SCADA и т. Д.Они могут поддерживать широкий спектр систем полевых шин связи, включая DeviceNet, PROFIBUS DP, ControlNet, MODBUS, PROFINET, Ethernet / IP и т. Д.
.Электрические консольные раздвижные ворота — Купите консольные раздвижные ворота, консольные ворота, откатные ворота Продукт на Alibaba.com
Информация о компании
Основанная в 1997 году, компания Foshan City Chancheng Dis CXHA Co., Ltd является одной из первых и крупнейших фабрик компании внешние откатные ворота. Мы получили более 30 патентов на новые технологии и внешний вид в индустрии наружных откатных ворот как TOP10 известных брендов, TOP10 крупнейших предприятий, известных брендов Китая.
У нас есть современный завод площадью 30000 квадратных метров и офисное здание площадью 8000 квадратных метров, а также 480 сотрудников и 20 человек, занимающихся исследованиями и разработками (включая 5 старших инженеров), и 15 полностью автоматических производственных линий, которые все оснащены от всемирно известных брендов, с нормальной производительностью. 100000 метров в год для всех видов главных ворот.
- В 1997 году компания была основана для производства ручных / электрических ворот
- В 1998 году разрабатывала и производила складные откатные ворота из нержавеющей стали
- В 2001 году разрабатывала и производила алюминиевые складные откатные ворота
- В 2004 году прошла сертификация качества ISO9001: 2000 Сертификация системы
- В 2006 году разработать интеллектуальный двигатель для безрельсовых складных откатных ворот
- В 2008 году разработать складные откатные ворота для виллы и жилого дома
- В 2009 году была построена новая производственная база и применена для производства
- В 2011 году были разработаны консольные откатные ворота для крупномасштабного производства
- В 2013 году были разработаны раздвижные ворота Villa Cantilever для крупномасштабного производства
- В 2014 году разработана интеллектуальная система парковки автомобилей для крупномасштабного производства
- В 2015 году консольные складывающиеся ворота были разработаны и прошли сертификацию ISO9001: 2008
- In 2016, линейные откатные ворота и поворотно-откатные ворота успешно разработаны
- В 201 7, Разработка безопасного и экологичного двигателя постоянного тока для электрических выдвижных ворот
Электроприводы | Фесто Россия
Эта ошибка возникает, когда подключено только напряжение нагрузки. Логическое напряжение для этого размера и конструкции подается через специальный адаптер (TN 537934) через интерфейс Profibus. Адаптер — незаменимый аксессуар для этого размера. Адаптер не требуется для работы с интерфейсами Profibus других размеров (42, 52, 62).Это требуется только в том случае, если напряжение нагрузки необходимо изолировать от логического напряжения, например для открытия защитной двери.
![]()
При этом учитывается вся система, то есть ось, двигатель и контроллер, где это необходимо.
![]()
Сервопривод — это регулируемая система.
Серводвигатель имеет резольвер для измерения смещения. Между заданным и фактическим положением происходит непрерывное сравнение. Это означает, что сервопривод движется точно в соответствии с заданным профилем движения.
Серводвигатель имеет высокий крутящий момент во всем диапазоне скоростей и может быть временно перегружен в 2-3 раза превышающим номинальный крутящий момент.
Привод шагового двигателя — это управляемая система.
Позиционирование осуществляется заданием количества управляющих импульсов.Крутящий момент уменьшается во всем диапазоне скоростей, и в случае его превышения существует риск «потери шагового двигателя».
![]()
идеально подходят для обеспечения высокой точности и высоких скоростей.
Напротив, если скорость и точность менее важны, можно использовать более дешевые шаговые двигатели.
![]()
Обычно рекомендуется использовать тормоз на вертикальном валу.
Это предотвращает «проседание» нагрузки, если привод не разблокирован или не подключен к источнику питания. Есть несколько исключений, например, механизмы автоматической блокировки, где тормоз не является обязательным.
![]()
Да, Festo может изготовить ось с фланцем для двигателя стороннего производителя.
![]()
Festo использует муфты с фрикционной блокировкой.Они имеют нулевой зазор, не подвержены износу и имеют 200% защиту от перегрузки.
Соединения с пазами и призматическими шпонками имеют серьезные недостатки при установке: для монтажа требуется определенный минимальный зазор на боковых краях (угловой зазор). Это приводит к люфту и, как следствие, к низкой точности позиционирования. Кроме того, края со временем «отклоняются», что приводит к увеличению углового зазора между ступицей муфты и валом двигателя. Поэтому соединения с пазами и призматическими шпонками используются в электродвигателях, которые непрерывно работают в одном направлении вращения и крутящего момента и поэтому не подходят для реверсивного режима.
![]()
Резольвер — это индуктивная измерительная система.
Принцип работы такой же, как у генератора, т.е. генерируется синусоидальное переменное напряжение, частота которого напрямую зависит от скорости.
Эта частота используется электроникой для расчета скорости, ускорения и положения.
![]()
В инкрементальной измерительной системе нет фиксированной нулевой точки.Для определения нулевой точки сначала необходимо использовать перемещение к началу отсчета, прежде чем станет возможным перемещение в абсолютное положение.
![]()
SEC-AC также может работать от 115 В переменного тока. Однако подключенный двигатель не сможет достичь своих номинальных и пиковых значений при 115 В переменного тока.
![]()
Наименьшая единица перемещения любой системы позиционирования — приращение.Если есть возможность передавать заданное положение на контроллер напрямую с приращениями, при использовании относительного позиционирования не возникает кумулятивной ошибки. Если контроллер позиционирования получает заданное положение как постоянную подачи, рассчитанную пользователем, ошибка округления в большинстве случаев приводит к кумулятивной ошибке.
Ошибки позиционирования также могут складываться, если движения относительно последнего фактического положения выполняются повторно. Поэтому на SEC-AC Festo предоставляет возможность движения относительно последней целевой позиции.
![]()
На обоих концах приводов имеется запас хода, чтобы оставить безопасное расстояние до механического конечного положения.
![]()
Нет, максимальный устанавливаемый ход составляет:
Позиционируемый ход = общий ход оси — удвоенный запас хода
Важно: Поддерживайте запас хода с каждой стороны приводного устройства.
![]()
Нет, полный ход оси дополнительно включает удвоенный запас хода.
Пример: DGE-25-500-SP
Рабочий ход = 500 мм
Запас хода = (2×10 мм) = 20 мм
Общий ход = 500 мм + 20 мм = 520 мм
![]()
Запас хода для каждого конечного положения не может быть рассчитан.Это безопасное расстояние до механического конечного положения относительно используемого рабочего хода. В результате всегда есть резерв до механического упора, например для аппаратных концевых выключателей для безопасного торможения системы без достижения механического конечного положения.
Запас хода обычно равен постоянной подачи вала.
![]()
Предварительное натяжение зубчатого ремня для линейной оси оказывает значительное влияние на его общие характеристики, особенно на срок службы и поведение ремня при максимальной нагрузке.
В общем, чрезмерное предварительное натяжение не только излишне нагружает подшипники зубчатого диска, но также повреждает ремень, в частности, из-за высоких усталостных нагрузок на изгиб на кордах.
С другой стороны, если предварительное натяжение слишком низкое, это приводит к пропуску зубчатого ремня.
Таким образом, основная задача предварительного натяжения состоит в том, чтобы гарантировать безупречное зацепление свободной стороны ремня, которая почти полностью провисает при максимальных усилиях подачи, с выходным диском.
Усилия предварительного натяжения осей с зубчатым ремнем Festo рассчитаны таким образом, что такое поведение надежно гарантируется даже при максимальном усилии подачи.
![]()
Какие блоки питания рекомендуются для MTR-DCI?
Во время активации и при запуске регулируемые двигатели постоянного тока потребляют во много раз больше тока, чем при нормальной работе.
Эти потребляющие устройства представляют собой временную перегрузку источника питания.
Номинальный ток источника питания должен быть по крайней мере равным пиковому току двигателя, а с учетом допусков двигателя должен быть обеспечен запас мощности от 20 до 50%.
Точные минимальные пределы тока можно найти в таблице ниже для выбора блока питания с характеристической кривой U / I.
| Тип двигателя / напряжение | Номинальный ток двигателя [A] | Пиковый ток двигателя [A] | Номинальный ток блока питания [A] |
|---|---|---|---|
| MTR-DCI-32 / 24V | 0,73 | 2,1 | из 3 |
| MTR-DCI-42 / 24V | 2 | 3,8 | из 6 |
| MTR-DCI-52 / 24V | 5 | 7,7 | из 10 |
| MTR-DCI-62 / 48V | 6,19 | 20 | из 15 |
![]()
Оси с зубчатым ремнем:
DGE-…- ZR + -0,008 мм до + — 0,1 мм
DGEA + — 0,05 мм
Оси шпинделя:
DGE -…- SP + -0,02 мм
![]()
DGEL-25 -…- KF — старое обозначение, описывающее ось с зубчатым ремнем и рециркуляционной шарикоподшипниковой направляющей (L означает Laufwagen — каретка).
DGE -…- ZR описывает модульную систему оси зубчатого ремня, в которой можно выбрать направляющую с шарикоподшипником с рециркуляцией (KF).
Две оси идентичны по конструкции.
![]()
Постоянные магниты интегрированы в линейные оси DGE-ZR и DGE-SP. Это означает, что можно использовать датчики SMT / SME с магнитным приводом. Их можно вставить в указанный слот датчика в профиле привода.
![]()
Датчики SME / SMT имеют ограниченный рабочий путь и поэтому не могут быть установлены непосредственно в механическом конечном положении.Таким образом, между датчиком и механическим конечным положением существует область, которая не контролируется.
![]()
Постоянные магниты не устанавливаются в ось консоли DGEA и направляющую ось роликовых подшипников DGE-ZR-RF. Следовательно, датчики SMT / SME использовать нельзя.
![]()
Нет, измерительный сигнал соответствует необработанному сигналу sin / cos в диапазоне милливольт.
Festo предлагает преобразователь измеренных значений, который преобразует выходной сигнал датчика перемещения в сигнал 0-10 В или 4-20 мА.
![]()
Для использования в электрических осях мы рекомендуем SIEN-… типа индуктивные датчики.
Соответствующий монтажный материал (монтажный кронштейн HWS) и переключающие проушины (SF) доступны для каждой оси. Эти компоненты избегают неопределенного участка между исходной точкой, точкой конечного положения и механическим конечным положением.
![]()
Оси с зубчатым ремнем DGE-ZR-KF, оси шпинделя DGE-SP-KF и оси позиционирования DMES доступны в версии с защитой от пыли (версия GA) типоразмеров 25 и 40.
![]()
Постоянная подачи — это осевое смещение оси точно на один оборот звездочки. Для постоянной подачи допуски не указаны. Влияющие факторы включают настройку предварительного натяжения зубчатого ремня и производственные допуски зубчатого ремня и звездочки. Таким образом, точная постоянная подачи должна определяться отдельно для каждой оси.
![]()
Festo используются исключительно инкрементальные датчики перемещения.
Эти датчики могут обнаруживать изменения положения и выводить их в виде последовательности импульсов. Поэтому для определения исходной точки для измерения абсолютного положения после запуска необходим возврат к началу отсчета. Контрольной точкой для этого перемещения к началу отсчета может быть отдельный контрольный выключатель, концевой выключатель или даже механический упор.
В контроллере мотора для серводвигателей SEC-AC один из двух концевых выключателей, обычно установленных по соображениям безопасности, по умолчанию используется для реферирования. Однако также можно использовать отдельный переключатель ссылки или реферирование для остановки.
Активация шагового двигателя SPC200-SMX в сочетании с контроллером шагового двигателя SEC-ST требует отдельного опорного переключателя. Использование концевых выключателей невозможно, поскольку здесь должны использоваться контакты NC (нормально замкнутые), в то время как контрольный выключатель настроен как NO (нормально разомкнутые).Ссылка на остановку невозможна, поскольку шаговый двигатель не имеет измерительной системы. Система управления не может обнаружить остановку.
С мини-суппортом SLT-E и линейным приводом HME, а также при обращении к контрольному переключателю также возможно обращение к остановке. Для получения хорошей точности соответствующий резиновый амортизатор следует снять с упора. Мы рекомендуем использовать эталонный датчик, который уже установлен в HME.
Моторный блок MTR-DCI — особый случай.Здесь положение сохраняется при выключении агрегата. Если вы можете убедиться, что привод не двигается при выключении, нет необходимости в перемещении к началу отсчета. В сочетании с позиционирующей осью DMES без ограничений возможно обращение к концевому упору или механическому упору вместо референтного переключателя
![]()
Точность повторения определяет отклонение, с которым достигается многократное приближение значения позиции (при одинаковых условиях).
Точность позиционирования — это отклонение между достигнутыми позициями и согласованной, общеприменимой шкалой длины. На него влияют точность используемой системы измерения, остаточное отклонение положения контроллера, погрешности постоянной подачи (например, шаг шпинделя) и температурные эффекты.
![]()
обеспечивают превосходную гибкость по сравнению со стандартными пневматическими приводами, поскольку их можно свободно устанавливать.Поэтому они более сопоставимы с сервопневматическими приводами.
Преимущества электроприводов перед сервопневматическими:
- Более высокая точность, особенно для приводов шпинделя
- Возможна большая длина хода с зубчатым ремнем
- Повышенное усилие с приводами шпинделя
- Очень высокий динамический отклик
- Низкий уровень шума
![]()
DGE-SP:
- Линейный привод с шарико-винтовой парой
- Высокая точность повторения
- Высокие усилия подачи (появление пиков силы)
- Высокая механическая устойчивость к внешним силам
- Высокая постоянная скорость
DGE-ZR:
- Привод линейный с зубчатым ремнем
- Высокая скорость и ускорение
- Большой ход
![]()
Сигнал резольвера состоит из аналоговых синусоидальных напряжений.Разрешение определяется в подключенном регуляторе.
Это напряжение составляет 16 бит для SEC-AC.
Выход энкодера на X11 (например, для ведомого устройства) передается с 1024 шагами на оборот.
![]()
Как и для всех вращающихся валов, критическая скорость гибки является решающим критерием для ограничения длины на осях DGE-SP. В случае очень длинных шпинделей, подверженных высоким осевым усилиям, в некоторых случаях нагрузка на изгиб также может быть критической.
Критическая скорость гибки — это скорость, с которой шпиндель совершает начальное колебание. Амплитуды колебаний очень высоки около резонансной частоты, что приводит к повреждению шарико-винтовой передачи. Это приводит к «неудобному» вибрационному шуму. На пониженной скорости также можно делать очень длинные ходы.
![]()
Modern Cantilever Gate Home Entrance Automation Roller Electric Metal Garden Gate Price Valve Opener
Информация о компании
Основанная в 1997 году, компания Foshan City Chancheng Dis C.X.H.A Co., Ltd является одной из самых ранних и крупнейших фабрик по производству внешних раздвижных ворот. Мы получили более 30 патентов на новые технологии и внешний вид в индустрии наружных откатных ворот как TOP10 известных брендов, TOP10 крупнейших предприятий, известных брендов Китая.
У нас есть современный завод площадью 30000 квадратных метров и офисное здание площадью 8000 квадратных метров, а также 480 сотрудников и 20 человек, занимающихся исследованиями и разработками (включая 5 старших инженеров), и 15 полностью автоматических производственных линий, которые все оснащены от всемирно известных брендов, с нормальной производительностью. 100000 метров в год для всех видов главных ворот.
- В 1997 году компания была основана для производства ручных / электрических ворот
- В 1998 году разрабатывала и производила складные откатные ворота из нержавеющей стали
- В 2001 году разрабатывала и производила алюминиевые складные откатные ворота
- В 2004 году прошла сертификация качества ISO9001: 2000 Сертификация системы
- В 2006 году разработать интеллектуальный двигатель для безрельсовых складных откатных ворот
- В 2008 году разработать складные откатные ворота для виллы и жилого дома
- В 2009 году была построена новая производственная база и применена для производства
- В 2011 году были разработаны консольные откатные ворота для крупномасштабного производства
- В 2013 году были разработаны раздвижные ворота Villa Cantilever для крупномасштабного производства
- В 2014 году разработана интеллектуальная система парковки автомобилей для крупномасштабного производства
- В 2015 году консольные складывающиеся ворота были разработаны и прошли сертификацию ISO9001: 2008
- In 2016, линейные откатные ворота и поворотно-откатные ворота успешно разработаны
- В 201 7, Разработка безопасного и экологичного двигателя постоянного тока для электрических выдвижных ворот