Визуально измерительный контроль: метод, проведение, цена в Нижнем Новгороде
Содержание
Визуально-измерительный контроль металлических конструкций куполов в православном храмовом комплексе
Информация
Заказчик (Генподрядчик):
Религиозная организация «Финансово-хозяйственное управление Русской Православной Церкви (Московский Патриархат)
Объект:
Православный храмовый комплекс
Адрес:
г. Москва, ВАО, район Косино-Ухтомский, ул. Святоозерная вл.1-3
Период выполнения:
25 декабря 2015 г.
Описание
Компания «Пожстройсервис» выполнила визуально-измерительный контроль металлических конструкций куполов православного храмового комплекса вместимостью 500 прихожан по адресу: г.
Москва, ВАО, район Косино-Ухтомский, ул. Святоозерная вл.1-3.
Описание метода и процедуры обследования
Визуально-измерительный контроль сварных соединений выполняется в соответствии с СП 70.13330.2012 «Несущие и ограждающие конструкции. Актуализированная редакция СНиП 3.03.01-87», РД 03-606-03 «Инструкция по визуальному и измерительному контролю», с целью выявления деформаций, поверхностных трещин, подрезов, прожогов, наплывов, кратеров, свищей, пор, раковин и других несплошностей и дефектов формы швов; проверки геометрических размеров сварных швов и допустимости выявленных деформаций, поверхностных несплошностей и дефектов формы сварных швов.
В выполненном сварном соединении визуально контролируется:
отсутствие (наличие) поверхностных трещин всех видов и направлений;
отсутствие (наличие) на поверхности сварных соединений дефектов (пор,включений, скоплений пор и включений, отслоений, прожогов, свищей, наплывов, усадочных раковин, подрезов, непроваров, брызг расплавленного металла, западаний между валиками, грубой чешуйчатости, а так же мест касания сварочной дугой поверхности основого материала;
размеры поверхностных дефектов (поры, включения и др. ), выявленных при визуальном контроле;
высоту и ширину шва, а также вогнутость и выпуклость обратной стороны шва в случае доступности обратной стороны шва для контроля;
высоту (глубину) углублений между валиками (западания межваликовые) и чешуйчатости поверхности шва;
подрезы (глубину и длину) основного металла;
отсутствие непроваров (за исключением конструктивных непроваров) с наружной и внутренней стороны шва;
размеры катета углового шва;
отсутствие переломов осей сваренных цилиндрических элементов.
Выводы по результатам обследования:
По результатам визуально-измерительного контроля установлено, что качество осмотренных сварных швов и их геометрические параметры удовлетворяет требованиям утвержденного проекта и п.10.4 СП 70.13330-2012. Выявленные дефекты допустимы в данных конструкциях.
Визуально-измерительный
Визуальный и измерительный контроль проводят на различных этапах изготовления или строительства объекта. Контроль заключается в визуальном осмотре объекта как невооруженным глазом, так и с помощью спецсредств. Осмотром выявляются зоны с дефектами, а последующим измерением определяется допустимость обнаруженных дефектов, их соответствие нормам технической документации на приемку изделия. Визуальный и измерительный контроль сварных соединений при сборке под сварку заключается в обеспечении соответствия формы и размеров кромок, чистоты поверхностей, величин зазоров, в исключении возможных смещений кромок и других отклонений от пространственного расположения свариваемых элементов.
Визуальный и измерительный контроль выполненных сварных соединений проводят с целью выявления деформаций, нарушений геометрических размеров швов, поверхностных дефектов (трещин, подрезов, прожогов, наплывов, кратеров, свищей, пор, раковин и других несплошностей) и иных несоответствий требованиям. Визуальный и измерительный контроль технических устройств и сооружений в процессе эксплуатации проводят с целью выявления изменений их формы, поверхностных дефектов в материале и сварных соединениях (наплавках), образовавшихся в процессе эксплуатации (трещин, коррозионных и эрозионных повреждений, деформаций и пр. ).
Визуальный и измерительный контроль выполняют до проведения контроля сварных соединений (наплавок) другими методами неразрушающего контроля, а также после устранения выявленных дефектов. К контролю допускаются поверхности объекта контроля очищенные от влаги, шлака, брызг металла, ржавчины и других загрязнений, препятствующих проведению контроля. Нельзя недооценивать важность проведения визуально-измерительного контроля. Отсутствие наружных дефектов объекта контроля, их своевременное выявление и устранение способствует в дальнейшем правильно, объективно и достоверно воспринять информацию об изделии, полученную физическими методами, такими как радиографический контроль и ультразвуковой контроль. Обнаружить и правильно оценить опасность наружных дефектов способны только опытные специалисты, имеющие многолетнюю практику по визуальному и измерительному контролю.
Дефектоскописты высокого уровня знают места объекта контроля, в которых вероятнее всего может появиться дефект. Такие профессионалы понимают причины возникновения дефекта, а также способы предупреждения. Кроме того, могут дать рекомендации по эффективному устранению обнаруженного дефекта, качественному ремонту.
Комплект для визуально-измерительного контроля ВИК-НДТ от производителя
Комплекты для визуального и измерительного контроля ВИК НДТ (с калибровкой) всегда в наличии на нашем складе в больших количествах.
Возможна поставка комплектов ВИК с поверкой.
Производитель: ООО «ГЕО-НДТ»
Гарантия: 12 месяцев
Комплект ВИК — это комплект для Визуально-Измерительного Контроля. Для проведения визуального контроля используют измерительные приборы и средства из комплекта Визуального и Измерительного Контроля.
Компания ООО «ГЕО-НДТ» предлагает комплекты собственного производства в соответствии с инструкцией «РД 03-606-03» по визуальному и измерительному контролю разработанной Управлением по котлонадзору и надзору за подъёмными сооружениями Госгортехнадзора Росссии, Управлением по надзору в химической, нефтехимической и нефтеперерабатывающей промышленности Госгортехнадзора Росссии, Отделом газового надзора Госгортехнадзора Росссии, АНТЦ «Энергомонтаж», ГУП «НТЦ «Промышленная безопасность», АО ВНИИСТ с участием НУЦ «Сварка и контроль» при МГТУ им.
Н.Э. Баумана.
Все комплекты ВИК-НДТ (комплект ВИК-NDT) комплектуются специалистами осуществляющими визуальный и измерительный контроль и имеющие аттестацию в соответствии с Правилами аттестации в области неразрушающего контроля.
Особенностью данного комплекта ВИК является специальная высококачественная удобная сумка с наплечным ремнем, изготовленная под заказ и предназначенная для работы в суровых полевых условиях. Материал сумки обладает влагозащитными свойствами. На сумке нашиты светоотражающие полосы, что облегчает ее поиск в темноте. Отсеки сумки выполнены под размеры принадлежностей, а также внутреннее пространство сумки ВИК-НДТ позволяет дополнительно размещать и другие приборы.
Комплект ВИК-НДТ предназначен для визуального контроля качества:
основного металла;
подготовки деталей к сварке;
сборки соединений деталей (сборочных единиц, изделий) под сварку;
готовых сварных соединений и наплавок;
изготовление деталей и сборочных единиц;
исправления дефектов в сварочных соединениях и основном металле,
изготовления (монтажа, ремонта) деталей,
сборочных единиц и изделий и при техническом диагностировании состояния металла и сварных
соединений в процессе эксплуатации, в т. ч. по истечении расчетного срока службы изделия.
и многих других задач.
Стандартная комплектация ВИК-НДТ:
№ п/п
Наименование
НТД
Кол-во
1.
Фонарик карманный
1
2.
Маркер по металлу
1
3.
Рулетка измерительная 5м
ГОСТ 7502-89
1
4.
Линейка металлическая измерительная 300х19х0,5
ГОСТ 427-75
1
5.
Линейка металлическая измерительная 150х19х0,5
ГОСТ 427-75
1
6.
Универсальный шаблон сварщика УШС-3
ТУ 3936-050-00221190-99
1
7.
УШС-2 (шаблон катетов швов)
СТБ 1133-98
1
8.
Набор щупов №1, 100мм 0,02-0,1*
ГОСТ 882-75
1
9.
Набор щупов № 4, 75мм 0,1-1,0*
1
10.
Шаблоны радиусные №3*
1
11.
Шаблоны радиусные №1*
1
12.
Штангенциркуль ШЦ 1-150-0,05 с глубиномером*
ГОСТ 166-89
1
13.
Угольник поверочный УП 160×100*
ГОСТ 3749-77
1
14.
Лупа Л-7х с подсветкой
1
15.
Лупа измерительная ЛИ-3-10х
1
16.
Лупа просмотровая (раскладная)
1
17.
Лупа просмотровая (асферическая)
1
18.
Сумка для переноски
1
19.
Батарейки
1
20.
Свидетельство о калибровке ВИК
1
21.
Паспорт
1
Внимание! В комплект ВИК не входит РД 03-606-03 “ИНСТРУКЦИЯ ПО ВИЗУАЛЬНОМУ И ИЗМЕРИТЕЛЬНОМУ КОНТРОЛЮ”, не действует с 01 января 2021г. Данный документ вошел в перечень отменяемых нормативных правовых актов федеральных органов исполнительной власти (постановление Правительства РФ от 6 августа 2020 г. №1192).
* В стандартной комплектации по умолчанию могут буть замены на следующие инструменты:
п/п 8,9. Набор щупов №1, 75 мм; Набор щупов №2, 70 мм; Набор щупов №2, 100 мм, Набор щупов №3, 75 мм; Набор щупов №3, 100 мм; Набор щупов №4, 100 мм
п/п 10,11. Шаблоны радиусные №2, т.е. могут быть разные комплекты №1 и №2, №1 и №3, №2 и №3
п/п 12. Штангенциркуль ШЦ 1-125-0,05 с глубиномером
Уточняйте необходимую Вам комплектность перед заказом.
По желанию заказчика комплект ВИК-НДТ может быть доукомплектован такими приборами НК как:
стенкомер,
толщиномер,
нутромер,
эндоскоп,
видеоэндоскоп,
бороскоп,
фиброскоп,
микроскоп,
фотоаппарат,
различными шаблонами, в том числе специальными, универсальными и измерительными инструментами.
А также допускается применение других средств визуального и измерительного контроля при наличии соответствующих инструкций и методик.
Ещё у нас Вы можете преобрести комплекты визуально-измерительного контроля ВИК:
комплект ВИК 1
комплект ВИК Эксперт
Комплект ВИК с поверкой (ВИК поверенный)
комплект ВИК Базовый
комплект вик Стандарт
ВИК экспертный комплект
ВИК Универсальный комплект
комплект ВИК Энергетик
комплект ВИК Инспектор
комплект ВИК Транснефть
комплект ВИК Сварщик
комплект ВИК Атомщик
комплект ВИК Элитест
комплект ВИК Аршин
Комплект ВИК Титан и другие комплекты визуального контроля ВИК.
Купить комплект визуально-измерительного контроля ВИК НДТ и узнать цену на комплект ВИК NDT Вы можете, отправив заявку на info@geo-ndt. ru. У нас самая выгодная цена на комплекты ВИК!
*Технические характеристики и комплект поставки оборудования могут быть изменены производителем без предварительного уведомления.
Дополнительную информацию по комплектам ВИК можно получить, обратившись к нашим специалистам, по телефонам, указанным в разделе «контакты».
Доставляем комплекты для визуального контроля по всей России курьерскими службами и транспортными компаниями.
Визуальный и измерительный контроль
ВИК — Визуально измерительный контроль
Осуществляя качественный и полноценный контроль сварных швов, используя современные технические средства, инновационные методики и технологии, сотрудники «ПРОконтроль», в обязательном порядке уделяют внимание и проверенным годами методам диагностирования дефектов сварных соединений. Большой практический опыт, а так же современные методики, позволяют нам эффективно использовать визуально измерительный контроль сварных соединений. Визуальный контроль качества сварных швов — предварительный этап, перед проведением приборных методов исследований.
Визуально измерительный контроль сварных швов — сравнительно простой метод для подтверждения качества сварки металлов.
Неаккуратно выполненные сварные швы — угрожают целостности конструкции и не гарантируют заявленные эксплуатационные качества. Избежать неприятностей, неизбежно связанных с дальнейшим использованием дефектных сварных соединений — помогает своевременное их обнаружение. Воспользовавшись услугами квалифицированных специалистов Научно производственной лаборатории «ПРОконтроль» — позволяет исключить вероятность техногенных аварий и разрушений конструкции. При работе по контролю качества сварных соединений, специалисты «ПРОконтроль» используют свой богатый практический опыт и весь имеющийся в наличии арсенал технических средств и оптических приборов.
Визуально измерительный контроль сварных швов (ВИК) — позволит выявить трещины, кратеры, поверхностные поры, наплывы, смещения кромок, свищи, прожоги, подрезы и другие визуально обнаружимые дефекты.
Как это работает?
Дефектные сварные соединения, отличаются от безукоризненно выполненных сварных швов. Грубые поверхностные дефекты — могут недвусмысленно указывать на характер и места возможного разрушения конструкции. Вооружившись оптическими приборами, специалисты «ПРОконтроль» скрупулезно, миллиметр за миллиметром обследуют места сварочных соединений. В зависимости от условий нахождения объекта (погодные условия, уровень освещения, дистанция до изделия) разнится и скорость проведения исследований. При обнаружении мест с вероятными дефектами, область маркируется. В зависимости от условий нахождения объекта (погодные условия, уровень освещения, дистанция до изделия) разнится и скорость проведения исследований. По итогам обследования, собственник объекта, или конструкции получает «Акт визуального осмотра сварных швов».
Достоинства ВИК.
К несомненным достоинствам визуального и измерительного контроля, относятся невысокая стоимость обследований и высокая оперативность при его проведении. Однако, следует отметить, что данное обследование, является предварительным и не может заменить более предметных методов аппаратного неразрушающего контроля.
По результатам ВИК специалисты «ПРОконтроль» могут ориентировочно оценить качественные параметры технологического процесса при изготовлении, либо ремонте конструкций.
Всё, что мы делаем — мы делаем хорошо! Высокая квалификация сотрудников, личная ответственность на каждом этапе работ — позволяют исключить влияние пресловутого «человеческого фактора» на результаты проводимых исследований. «ПРОконтроль» — комплексное решение проблем при выявлении дефектов конструкций.
Визуальный осмотр и визуальный контроль
Визуальный осмотр и визуальный контроль в промышленном секторе осуществляется с использованием оборудования из области термографии, эндоскопии, микроскопии и высокоскоростной микроскопии.
Измерительные приборы для визуального контроля
PCE Instruments предлагает широкий ассортимент эндоскопов, высокоскоростных камер, тепловизоров и микроскопов для визуального контроля компонентов, испытательных блоков, машин и установок.
При оснащении предприятия данным типом средств измерений субъективный осмотр и визуальный контроль становятся более объективными благодаря тому, что в распоряжении оператора имеется оборудование, позволяющее оценивать удельные характеристики и неоднородность поверхностей материалов . Конечно, инспектору также необходимо иметь хороший уровень знаний и опыта в области профилактического обслуживания и визуального осмотра.
Большая часть оборудования позволяет сохранять измерения, изображения и видео для последующего документирования результатов визуального осмотра компьютера.Это позволяет другим сотрудникам также участвовать в оценке и получать более качественную оценку результатов.
Свяжитесь с Великобританией Мистер Джон Маллиган PCE Instruments UK Ltd. Ensign Way, Саутгемптон, Хэмпшир Великобритания, SO31 4RF Телефон: 023 8098 7034 jmu@pce-instruments. com Свяжитесь с нами Мистер Дональд Лаудермилк PCE Америкас Инк.. (Инструменты PCE) 711 Коммерс Уэй, офис 8 Юпитер, Флорида 33458 Телефон: (561) 320-9162 доб. 101 [email protected]
Эндоскопия
Одним из видов измерительного оборудования, используемого в настоящее время для визуального контроля, являются промышленные эндоскопы. Эти системы визуального контроля были разработаны специально для промышленной области.Обычно эти устройства управления являются портативными, а некоторые из них оснащены программным обеспечением для передачи и анализа данных на ПК.
Промышленные эндоскопы для визуального контроля
Термография
Тепловизоры являются надежными средствами визуального контроля, которые позволяют осуществлять визуальный контроль по распределению тепла на различных поверхностях. Тепловизор можно использовать для поиска утечек в подземных трубах или трубах, находящихся внутри стен (например, в зданиях, где невозможен непосредственный визуальный осмотр), а также для анализа энергоэффективности жилья.Cámaras termográficas para la inspección visual
Термографические камеры для визуального контроля
Высокоскоростная визуализация
Визуальный контроль, ручной или автоматический, с использованием высокоскоростных камер, дает оператору возможность контролировать качество продукта в производственных процессах, для которых важно, чтобы продукт проходил быстро и без возможности задержания.Эта технология может быть очень эффективной, например, при поиске ошибок в процессах механической упаковки или в системах розлива.
Высокоскоростные камеры для визуального контроля
Микроскопия
Микроскопы используются при визуальном осмотре, например, для осмотра плит или печатных плат, точек сварки и контроля возможных видимых ошибок на токопроводящих дорожках. Ошибки монтажа SMD (Survace Mounting Device) можно легко обнаружить с помощью этих устройств.Вы также можете использовать этот тип визуального осмотра, чтобы проверить, есть ли на поверхности материалов царапины или трещины.
Микроскопы для визуального контроля
Система видеоизмерений VMS-840XY — цифровые микроскопы Caltex
Измерение X-Y 8″ x 4″ с разрешением 1 микрон
Высокоточное измерение с автоматическим обнаружением краев, VMS-840XY — это современная система видеоизмерений, сочетающая в себе оптический компаратор , цифровой микроскоп, бесконтактную контрольно-измерительную систему в одной системе для повседневных нужд точной метрологии.С помощью этой доступной системы вы можете выполнять функции оптического компаратора и видеоинспекции в одной обновленной системе с современным программным обеспечением и компьютером.
Бесконтактная КИМ, компьютеризированная система видеоизмерений
8″ x 4″ XY измерение с разрешением 1 микрон
Программное обеспечение для автоматического определения границ для измерения одним щелчком
цветная цифровая камера высокого разрешения 1.3 мегапикселя (1280×1024)
зум-увеличение 30x-200x с фиксаторами
ручная фокусировка по оси Z с точной регулировкой фокуса и блокировкой
встроенный светодиодный кольцевой светильник с сегментным управлением, компьютерное управление
встроенная светодиодная подсветка, компьютерное управление
быстрое ручное измерение с цифровым считыванием DRO
Механизм предметного столика XY с поворотным диском для точного перемещения и быстросъемным механизмом для быстрого перемещения
Приложения
медицинское устройство
обрабатываемая деталь
обратный инжиниринг
Неизолированная печатная плата печатной платы
металл, пластик, профиль
полупроводник
высокоточное измерение
Скриншоты
программное обеспечение для автоматического определения границ
Цифровое считывание DRO
сегментированный верхний светодиодный фонарь для лучшего контроля поверхности
автоматическое обнаружение края или ручные измерения
Технические характеристики
Система видеоизмерений. Бесконтактная измерительная система видеокомпаратора (VMS-840XY)
Прочие бесконтактные видеоизмерительные системы
Цифровая микроскопическая видеоизмерительная система с USB-камерой микроскопа Sony CCD (VZM-200)
Диапазон цен от 5 до 6 тысяч долларов
LX-100 система контроля видеоизмерений
Ценовой диапазон от 3 до 4 тысяч долларов
Бесконтактные визуальные измерительные системы — Современные медицинские разработки
Используя сгенерированные лазером, похожие на голограммы 3D-изображения, вспыхивающие в светочувствительную смолу, исследователи из Ливерморской национальной лаборатории Лоуренса вместе с академическими сотрудниками обнаружили, что они могут создавать сложные 3D-детали за долю времени, затрачиваемого на традиционную послойную печать. .
Аддитивное производство (AM) позволяет изготавливать детали в конфигурациях и конструкциях, которые ранее были невозможны, но технология была ограничена, поскольку на создание некоторых трехмерных деталей могут уйти часы или дни. Однако с помощью созданных лазером трехмерных изображений, похожих на голограммы, вспыхивающих в светочувствительную смолу, исследователи из Ливерморской национальной лаборатории (LLNL), , вместе с сотрудниками из Калифорнийского университета в Беркли , Университета Рочестера и Массачусетса. Технологический институт (MIT) занимается созданием сложных 3D-деталей в кратчайшие сроки.
«Тот факт, что вы можете создавать полностью трехмерные детали за один шаг, действительно решает важную проблему аддитивного производства», — говорит исследователь LLNL Максим Шустефф, ведущий автор статьи об этом подходе. «Настоящая цель этой статьи заключалась в том, чтобы спросить: «Можем ли мы создать произвольные трехмерные формы сразу, вместо того, чтобы постепенно собирать части слой за слоем?». Оказывается, мы можем».
Перекрывающиеся три лазерных луча, которые определяют геометрию объекта с трех направлений, создают трехмерное изображение, подвешенное в ванне со смолой. Лазерный свет с более высокой интенсивностью в месте пересечения лучей остается включенным в течение примерно 10 секунд для отверждения детали. Излишки смолы стекают из ванны, оставляя полностью сформированную трехмерную деталь.
«Это демонстрация того, каким может быть аддитивное производство следующего поколения», — говорит инженер LLNL Крис Спадаччини, возглавляющий отдел 3D-печати в Ливерморской лаборатории.
Шустеф и его команда напечатали балки, плоскости, распорки под произвольными углами, решетки и сложные и уникально изогнутые объекты. Обычный AM имеет трудности с печатью структур, которые могут провиснуть без поддержки.Объемная печать создает изогнутые поверхности без артефактов наслоения.
«Возможно, это единственный способ сделать AM, который не требует наслоения», — говорит Шустефф. «Если вы можете отказаться от многослойности, у вас есть шанс избавиться от гребней и направленных свойств. Я надеюсь, что это вдохновит исследователей на поиск других способов сделать то же самое с другими материалами».
Объемная 3D-печать создает детали путем перекрытия трех лазерных лучей, которые определяют геометрию объекта с трех разных направлений, создавая голографическое 3D-изображение, подвешенное в ванне со смолой.
Шустефф считает, что объемная печать может быть быстрее при использовании более мощного источника света.
Техника имеет ограничения. Поскольку каждый луч распространяется в пространстве без изменений, существуют ограничения на разрешение деталей и типы геометрии, которые могут быть сформированы. Чрезвычайно сложные структуры потребуют множества пересекающихся лазерных лучей, что ограничивает процесс.
Спадаччини добавляет, что для улучшения и точной настройки свойств смолы для улучшения структуры потребуются дополнительные химические и инженерные исследования полимеров.
«Если вы оставите свет включенным слишком долго, он начнет лечить везде, так что есть игра на время», — говорит Спадаччини. «Большая часть науки и инженерии выясняет, как долго вы можете держать его и с какой интенсивностью, и как это сочетается с химией».
Ливерморская национальная лаборатория Лоуренса www.llnl.gov
Работа финансировалась в рамках программы лабораторных исследований и разработок (LDRD). Дополнительными исследователями LLNL, которые внесли свой вклад в проект, были Тодд Вайсграбер и Роберт Панас, аспирант Лоуренса и доктор философии Рочестерского университета.Студентка D. Эллисон Бровар, аспиранты Калифорнийского университета в Беркли Бретт Келли и Йоханнес Хенрикссон вместе с Николасом Фангом в Массачусетском технологическом институте.
Измерение—ArcGIS Pro | Документация
Инструменты измерения измеряют расстояния, площади, углы, направления, смещения и местоположения объектов на карте или сцене. Вы можете нарисовать линию для измерения длины, нарисовать многоугольник для измерения площади или щелкнуть отдельный объект, чтобы получить информацию об измерении. Вы также можете рисовать комбинации линий для измерения углов между парами линий или для измерения расстояний смещения от исходной базовой линии, которую вы рисуете. В сцене есть дополнительный инструмент для измерения вертикальных расстояний.
Измерение на карте или в сцене
Инструменты измерения расположены на вкладке Карта в картах и сценах. Выберите инструмент и начните измерение в виде. Результаты измерений отображаются в экранном окне на карте.
Примечание:
Когда вы привязываетесь к объекту со смещением в символах, привязка происходит к геометрии объекта, а не к символу смещения.
Инструменты измерения описаны в таблице ниже:
Инструмент мера
Описание
Расстояние
Измерьте расстояние между двумя или более точками.
Значение измерения расстояния по 2D-карте рассчитывается с использованием указанного режима измерения.
В режиме 3D вы можете измерять точки не на земле. Например, щелкните окно или фасад здания и выполните измерение до другого здания.
Возвращаются следующие значения результатов измерения:
3D Distance — трехмерное расстояние по прямой линии
Map Distance — двухмерное расстояние карты, рассчитанное с использованием указанного режима измерения
Height Difference — разница высот по вертикали Азимут — направление, рассчитанное в градусах от истинного севера для перемещения от первой точки к последней с использованием текущих настроек измерения.
Путь Чистое расстояние — расстояние от начала пути до конца пути с использованием текущих параметров измерения.
Изменение высоты пути (3D) — разность по вертикали между первой и последней точками на измеренном пути.Вы можете выполнять геодезические измерения площади в географической системе координат (ГСК) и плоскостные измерения площади в системе координат проекции (ПКС).
В 3D измеренная площадь возвращает площадь 2D-поверхности.
Измерение объектов
Измерение длины объекта (линии), периметра и площади (многоугольники) или координат x,y,z (точечные объекты).
Измерение по вертикали (только 3D)
Проведите вертикальную линию для измерения высоты или для измерения разницы между двумя точками.Переместите указатель в сторону, чтобы расширить контрольный круг в конце линии, чтобы помочь определить верхнюю (или нижнюю) точку измерения.
Измерение расстояния по направлению (только 2D)
Нарисуйте линию на карте, чтобы измерить прямолинейное направление и расстояние между двумя или более точками.
Если включена коррекция Ground To Grid, также отображаются скорректированные значения.
Измерение смещения (только 2D)
Измерение одного или нескольких перпендикулярных смещений от начерченной базовой линии.
Если включена коррекция Ground To Grid, также отображаются скорректированные значения.
Измерение угла (только 2D)
Нарисуйте две или более линии для измерения углов. Измеренные углы перечислены независимо от того, по часовой стрелке или против часовой стрелки.
Чтобы использовать инструменты измерения, выполните следующие шаги:
В представлении карты или сцены на вкладке Карта в группе Запрос щелкните раскрывающееся меню Измерение.
Выберите измерительный инструмент. Окно наложения измерений появляется в верхнем левом углу представления. Инструменты измерения, специфичные для 2D или 3D, активируются, когда это применимо.
Нажмите на вид, чтобы начать измерения. Нажмите, чтобы измерить объект, или нарисуйте две или более точек, чтобы измерить расстояния, площадь, направление или углы. На карте цвет линии обратной связи представляет собой пунктирную сине-белую линию. В сцене это пунктирная оранжево-белая линия. Для некоторых инструментов требуется начальная базовая линия, после чего все дополнительные линии измеряются от базовой линии.
При необходимости в окне измерения задайте единицы измерения результатов и режим измерения.
Для единиц измерения щелкните раскрывающийся список и выберите единицу для результата измерения. Одновременно может отображаться только один блок. Для измерения площади, объекта и направления можно установить единицы измерения для различных компонентов. Например, вы можете установить единицы для общей площади, а также единицы, возвращаемые для каждого сегмента полигона, используемого для расчета площади.
В режиме щелкните раскрывающийся список, чтобы установить интерактивный тип измерения для измерения расстояний между линиями.Планар по умолчанию. Измерения смещения, угла и направления доступны только в плоскостном режиме.
При необходимости щелкните карту или сцену, чтобы добавить дополнительные сегменты.
Окно наложения измерений содержит сводку измеренных значений, а также чистый угол направления и значение расстояния.
Нажмите Esc в любой момент во время эскиза, чтобы отменить измерение и начать заново, или нажмите «Очистить результаты», чтобы полностью очистить и сбросить результаты измерения. Щелкните Копировать результаты, чтобы скопировать и вставить результаты для использования в других приложениях.
В окне измерения при необходимости переключитесь на другой инструмент измерения с помощью раскрывающегося меню.
Дважды щелкните или нажмите F2, чтобы завершить эскиз измерения и сохранить результаты в окне измерения, пока вы не закроете активный вид. Инструмент измерения остается активным.
Щелкните Закрыть в окне наложения измерений, когда закончите измерение. При закрытии окна наложения показателей снова активируется инструмент Исследовать.
Примечание:
Для карт с включенной коррекцией «Земля к сетке» результаты измерений с помощью функций «Измерение смещения» и «Измерение расстояния в направлении» показывают значения сетки, а также значения после корректировки относительно земли.
Дополнительные сведения см. в разделе Коррекция заземления по сетке.
Измерение в сцене
При использовании инструмента «Измерить расстояние» в сцене результаты измерений включают визуальную обратную связь для нескольких возвращаемых компонентов. Пунктирная оранжево-белая линия указывает прямое расстояние между текущими конечными точками, когда вы рисуете сегменты на поверхности. Метки для расстояний смещения по вертикали и расстояний 2D также отображаются там, где это применимо. Динамическая горизонтальная лазерная линия показывает сравнительные высоты по всему виду.Когда вы наводите курсор на стрелку компонента высоты, вы можете ограничить расстояние
измерения по вертикали, что означает, что измерение остается в направлении Y только при перетаскивании стрелки
перпендикулярно первому щелчку сегмента. Если мышь движется
достаточно далеко от вертикали, он возвращается к измерению в
полный 3D дистанционный режим.
Чтобы измерить высоту или разницу между двумя точками, используйте Измерение по вертикали. Например, вы можете измерить высоту горы или высоту здания.
Для измерения глубины под землей обязательно включите подземную навигацию. В разделе «Поверхность высот» на вкладке «Внешний вид» установите флажок «Навигация под землей» для поверхности.
Чтобы изменить перспективу (панорамирование, масштабирование или поворот) во время измерения, нажмите клавишу C для временной навигации. Отпустите клавишу C, чтобы продолжить измерение.
Совет:
Для точного измерения расстояний по вертикали при просмотре профиля рекомендуется использовать инструмент Измерить расстояние , который поддерживает привязку.
Режимы измерения
Режим измерения раскрывающийся список предоставляет следующие режимы измерения Вы можете использовать для измерения расстояния:
Mode
Описание
Геодезические
кратчайшая линия между двумя точками земной поверхности на сфероиде (эллипсоиде). Одним из способов использования геодезической линии является определение кратчайшего расстояния между двумя городами для траектории полета самолета.Это также известно как линия большого круга, если она основана на сфере, а не на эллипсоиде.
Плоскость
Плоскостные измерения используют двумерную декартову математику для расчета длины и площади. Этот параметр доступен только при измерении в проекционной системе координат, и 2D-плоскость этой системы координат используется в качестве основы для измерений.
Локсодромное
Локсодромное расстояние – это линия постоянного пеленга или азимута.Большие круги часто разбиваются на серию локсодромий, что упрощает навигацию. Это также известно как линия румба. В отличие от геодезической линии, это не кратчайшее расстояние между двумя точками.
Большой эллиптический
Линия на сфероиде (эллипсоиде), определяемая пересечением на поверхности плоскости, проходящей через центр сфероида, начальную и конечную точки сегмента. Это также известно как большой круг, когда используется сфера.Большой эллиптический тип позволяет вам создавать только линии.
Выберите единицы измерения для проекта
Единицы, перечисленные для каждого инструмента измерения, являются производными от единиц, установленных для проекта. В окне «Измерение» одновременно может отображаться только одна единица измерения.
При использовании окна «Измерение» необходимо выбрать имперские или метрические единицы. Эти параметры представляют собой наборы связанных единиц измерения, таких как сантиметры, метры и километры, которые автоматически настраиваются в зависимости от измеряемого расстояния или площади.При увеличении или уменьшении масштаба единица измерения обновляется. Например, в метрических единицах результат измерения ширины дороги составляет 15 метров, а расстояние между Парижем и Римом составляет 1100 километров без каких-либо изменений в настройках единиц измерения.
Когда вы впервые открываете инструмент «Измерение», он использует единицы измерения расстояния и площади по умолчанию для проекта, чтобы определить имперские или метрические единицы измерения. При необходимости используйте раскрывающееся меню в окне «Измерение», чтобы изменить единицы измерения.
Выполните следующие действия, чтобы управлять списком единиц измерения для инструмента «Измерение».
Нажмите «Проект» и нажмите «Параметры».
Выберите вкладку «Единицы» в диалоговом окне «Параметры», чтобы просмотреть настройки единиц измерения.
На вкладке «Единицы» разверните разделы «Единицы расстояния» или «Единицы площади», чтобы внести изменения.
Чтобы добавить новый блок, щелкните Выбрать код блока и выберите из списка всех доступных блоков.
Чтобы удалить, отформатировать или сделать единицу измерения по умолчанию, щелкните ее правой кнопкой мыши.
Нажмите OK, чтобы закрыть диалоговое окно параметров проекта.
Постоянная обратная связь измерения в сценах
Вместо интерактивного измерения в сцене всегда доступны два других типа обратной связи измерения, независимо от того, включен ли инструмент измерения во время навигации по виду. Эти значения отображаются в нижней части вида рядом с отображением координат.
Координата Z — высота поверхности или объекта в месте расположения указателя. Z-единицы определяются единицами высоты, установленными для вашей сцены.
Расстояние до курсора — расстояние по прямой линии от вашего положения просмотра до местоположения в представлении. Вы должны включить это как опцию навигации.
Похожие темы
Отзыв по этой теме?
Расчет метрик кода — Visual Studio (Windows)
Статья
3 минуты на чтение
Полезна ли эта страница?
Пожалуйста, оцените свой опыт
да Нет
Любая дополнительная обратная связь?
Отзыв будет отправлен в Microsoft: при нажатии кнопки отправки ваш отзыв будет использован для улучшения продуктов и услуг Microsoft. Политика конфиденциальности.
Представлять на рассмотрение
Спасибо.
В этой статье
Повышенная сложность современных программных приложений также увеличивает сложность обеспечения надежности и удобства сопровождения кода. Метрики кода — это набор показателей программного обеспечения, которые позволяют разработчикам лучше понять код, который они разрабатывают. Используя метрики кода, разработчики могут понять, какие типы и/или методы следует переработать или более тщательно протестировать.Команды разработчиков могут выявлять потенциальные риски, понимать текущее состояние проекта и отслеживать ход разработки программного обеспечения.
Разработчики могут использовать Visual Studio для создания данных метрик кода, которые измеряют сложность и ремонтопригодность их управляемого кода. Данные метрик кода можно генерировать для всего решения или отдельного проекта.
Сведения о том, как создавать данные метрик кода в Visual Studio, см. в разделе Практическое руководство. Создание данных метрик кода.
Программные измерения
В следующем списке показаны результаты метрик кода, которые вычисляет Visual Studio:
Индекс ремонтопригодности — вычисляет значение индекса от 0 до 100, представляющее относительную простоту обслуживания кода.Высокое значение означает лучшую ремонтопригодность. Оценки с цветовой кодировкой можно использовать для быстрого выявления проблемных мест в коде. Зеленый рейтинг находится между 20 и 100 и указывает на хорошую ремонтопригодность кода. Желтый рейтинг находится между 10 и 19 и указывает на то, что код умеренно ремонтопригоден. Красный рейтинг — это рейтинг от 0 до 9, который указывает на низкую ремонтопригодность. Дополнительные сведения см. в разделе Диапазон и значение индекса ремонтопригодности.
Цикломатическая сложность — измеряет структурную сложность кода. Он создается путем подсчета количества различных путей кода в потоке программы. Программа со сложным потоком управления требует большего количества тестов для достижения хорошего покрытия кода и менее удобна в сопровождении. Для получения дополнительной информации см. статью Википедии о цикломатической сложности.
Глубина наследования — указывает количество различных классов, которые наследуются друг от друга, вплоть до базового класса. Глубина наследования аналогична связыванию классов в том смысле, что изменение в базовом классе может повлиять на любой из его унаследованных классов.Чем выше это число, тем глубже наследование и тем выше вероятность того, что модификации базового класса приведут к критическим изменениям. Для глубины наследования низкое значение — хорошо, высокое — плохо.
Связывание классов — Измеряет связь с уникальными классами через параметры, локальные переменные, возвращаемые типы, вызовы методов, универсальные или шаблонные экземпляры, базовые классы, реализации интерфейса, поля, определенные во внешних типах, и оформление атрибутов. Хороший дизайн программного обеспечения требует, чтобы типы и методы имели высокую связность и низкую связанность. Высокая связанность указывает на то, что дизайн сложно повторно использовать и поддерживать из-за его многочисленных взаимозависимостей от других типов. Дополнительные сведения см. в разделе Связывание классов.
Строки исходного кода — Указывает точное количество строк исходного кода, присутствующих в исходном файле, включая пустые строки. Эта метрика доступна, начиная с Visual Studio 2019 версии 16.4 и Microsoft.CodeAnalysis.Metrics (2.9.5).
Строки исполняемого кода — Указывает приблизительное количество строк исполняемого кода или операций. Это количество операций в исполняемом коде. Эта метрика доступна, начиная с Visual Studio 2019 версии 16.4 и Microsoft.CodeAnalysis.Metrics (2.9.5). Это значение обычно близко соответствует предыдущей метрике, Lines of Code , которая представляет собой метрику на основе инструкций MSIL, используемую в устаревшем режиме.
Строки кода — Указывает приблизительное количество строк в коде. Количество основано на коде IL и, следовательно, не является точным количеством строк в файле исходного кода. Большое количество может указывать на то, что тип или метод пытается выполнить слишком много работы и должен быть разделен. Это также может означать, что тип или метод сложно поддерживать.
Примечание
Версия инструмента метрик кода для командной строки подсчитывает фактические строки кода, поскольку анализирует исходный код, а не IL.
Анонимные методы
Анонимный метод — это просто метод без имени. Анонимные методы чаще всего используются для передачи блока кода в качестве параметра делегата. Результаты метрик кода для анонимного метода, объявленного в члене, например метода или средства доступа, связаны с членом, который объявляет метод. Они не связаны с членом, вызывающим метод.
Сгенерированный код
Некоторые программные средства и компиляторы генерируют код, который добавляется в проект и который разработчик проекта либо не видит, либо не должен изменять. В основном Code Metrics игнорирует сгенерированный код при вычислении значений метрик. Это позволяет значениям показателей отражать то, что разработчик может видеть и изменять.
Код, сгенерированный для Windows Forms, не игнорируется, поскольку это код, который разработчик может увидеть и изменить.
Следующие шаги
Датчики DULCOTEST® для растворенного кислорода
Надежное онлайн-измерение растворенного кислорода – с датчиками DULCOTEST ®
Измеряемая переменная «растворенный кислород» указывает объем газообразного кислорода, физически растворенного в водной фазе, в мг/л (частей на миллион) или насыщение воды кислородом в %.Новый тип DO 3 основан на визуальном измерении флуоресценции и может быть подключен к процессу в погружной трубе или в проточном фитинге. Его можно использовать для контроля воды, богатой кислородом, такой как поверхностная вода или питьевая вода, а также для контроля аэрации аэротенков на очистных сооружениях.
Ваши льготы
Эффективное управление технологическим процессом за счет точных онлайн-измерений в режиме реального времени
Универсальные и оптимизированные средства подключения датчиков к процессу
Минимальное обслуживание благодаря визуальному принципу измерения с типом DO 3
Максимальная чувствительность измерения благодаря амперометрическому принципу измерения с типом DO 2
Встроенное измерение температуры (Pt 1000) компенсирует влияние температуры
Электроды с мембранным покрытием для снижения зависимости от расхода и перекрестной чувствительности
Технические детали
Точность измерения: Тип DO 2: ±0.05 мг/л, тип DO 3: ±0,1 мг/л
Температура: 0 … 50 °C
Макс. давление: Тип DO 2: 1 бар, тип DO 3: 2 бар
Степень защиты: IP 68
Напряжение питания: Тип DO 2: 12 … 30 В пост. тока, тип DO 3: 18…30 В пост. тока
Датчик растворенного кислорода DO 3 мА
Широко используемый датчик для измерения концентрации кислорода, растворенного в воде, выше 0,1 ppm до насыщения кислородом. Для установки в стандартные погружные трубы или в байпасную линию технологического потока.Использование в аэротенках очистных сооружений, гидротехнических сооружений, в рыбоводстве или для мониторинга поверхностных вод. Минимальное обслуживание благодаря визуальному принципу измерения.
Ваши преимущества
Измеряемая величина: Растворенный кислород, минимальное обслуживание в загрязненной воде благодаря визуальному принципу измерения
Заводская калибровка стабильна в течение длительного времени. Калибровка требуется только после замены колпачка визуального датчика
Стержневая конструкция для простой установки в стандартные погружные трубы и байпасные фитинги ProMinent
Отсутствие зависимости от расхода и сведение к минимуму ошибок, связанных с наличием в воде ингредиентов, благодаря принципу визуального измерения гашения
Долгое время жизни флуоресцентного красителя и простой замены заменой датчика Cap
4
Растворенный кислород
Калибровка
на атмосферный кислород или по ссылке измерения в технологическая вода
Точность измерения
±0. 1 мг / л
датчик времени ответа T 90
<60 S при 25 ° C от воздуха до азота
6
0 … 50 ° C
Температурная коррекция
встроенный Pt1000, питание снаружи
Макс. Давление
Измерение даже возможно без потока
Напряжение питания
18 … 30 V DC
фиксированного свинца, 10 м
Выходной сигнал
4 . .. 20 мА Отправлено на измерительный диапазон, корректирован температуру, калиброванные и электрически изолированные
Оценка корпуса
IP 65
Интеграция в процесс
а) Погружение с помощью погружной трубы (ПВХ, d40/DN 32, предоставляется заказчиком).Соединение можно выполнить с помощью переходника для погружной трубы (переходной ниппель, № заказа 356924) и уголка 45° (№ заказа 356335). Обе части входят в комплект поставки и могут быть заказаны как аксессуары (см. также аксессуары).
b) Установка в байпасные фитинги ProMinent, тип DGMa с монтажным комплектом G1” для датчика 25 мм (1113807), тип DGMa с монтажным комплектом 7
и тип DLG III с монтажным комплектом 815079
Контроллеры
DACb из прошивки 02.01.01.02 С полным функционалом калибровки и всеми поправочными переменными (температура, соленость, атмосферное давление, высота над уровнем моря). Отображаемые единицы: [ppm] и [% насыщения кислородом]DACa, AEGIS II, D1C: Калибровка возможна только в том случае, если вводится эталонная концентрация, определенная по технологической воде. Только переменная коррекции температуры. Отображаемая единица измерения: [млн. большие аквариумы в зоопарках, оценка биологического состояния поверхностных вод.
Устойчивость к
Загрязненная вода и следующие химические соединения: двуокись углерода, сероводород, двуокись серы, окись этилена и против гамма-стерилизации.
Меньше
Окислитель (например, хлор, диоксид хлора, озон) и многие органические растворители (например, хлороформ, толуол, ацетон)
Принцип измерения, технология
Оптический: Измерение времени релаксации импульсного флуоресцентного пучка
Диапазон измерения
Номер заказа.
DO 3-MA-20 PPM
0.10 … 20,0 мг / л
1094609
0 результатов
Фильтр по типу документа
только в
английский
Соответствующие загрузки
Больше матчей нет!
К сожалению, мы не нашли подходящего совпадения.
Все слова написаны правильно?
Искать снова с меньшим количеством или другими условиями поиска?
Служба недоступна
Сервер временно не может обслужить ваш запрос из-за простоя на техническое обслуживание или проблем с пропускной способностью. Пожалуйста, повторите попытку позже.
Границы | Метод измерения диапазона движений суставов нижних конечностей человека посредством взаимодействия человека и машины на основе машинного зрения
Введение
По данным World Population Prospects 2019 (United Nations, 2019), к 2050 году каждый шестой человек в мире будет старше 65 лет, по сравнению с одним из 11 в 2019 году (Tian et al., 2021). Пожилые люди являются самой большой потенциальной популяцией пациентов с инсультом, что также приведет к увеличению распространенности инсульта (Wang et al., 2019). Дисфункция нижних конечностей, вызванная инсультом, стала тяжелым бременем для семьи и общества (Coleman et al., 2017; Hobbs and Artemiadis, 2020; Doost et al., 2021; Ezaki et al., 2021). В настоящее время более эффективным методом лечения инсульта является реабилитационная ЛФК. В соответствии с характеристиками инсульта и двигательной функции человека, он в основном использует механические факторы, основанные на кинематике, спортивной механике и нейрофизиологии, и выбирает соответствующие функциональные действия и методы упражнений для обучения пациентов предотвращению заболеваний и способствует выздоровлению. физические и психические функции (Gassert and Dietz, 2018; D’Onofrio et al., 2019; Сеспедес и др., 2021). Интеграция искусственного интеллекта, бионики, робототехники и реабилитационной медицины способствовала развитию индустрии реабилитационных роботов (Su et al., 2018; Wu et al., 2018, 2020, 2021b; Liang and Su, 2019). Благодаря инновациям в технологии реабилитационный робот обладает характеристиками точного движения и длительной повторяющейся работы, что дает очень хорошее решение многих сложных реальных проблем, таких как сложность стандартизации реабилитационного движения, нехватка реабилитационных врачей. и растущее число пациентов с инсультом (Deng et al., 2021а,б; Ву и др., 2021а). Lokomat разработан как самый известный робот для реабилитации нижних конечностей, который был проведен во многих клинических исследованиях (Lee et al., 2021; Maggio et al., 2021; van Kammen et al., 2021). В основном он состоит из трех частей: тренажера для ходьбы, подвесной системы для похудения и беговой платформы. Indego — это носимый робот для реабилитации нижних конечностей, разработанный Университетом Вандербильта в США (Tan et al., 2020). Пользователь может удерживать равновесие тела с помощью трости, опирающейся на предплечье, или автоматического вспомогательного приспособления для ходьбы.Физиотерапевт имеет функции пассивного обучения и активного обучения и может реализовать взаимодействие между оператором и роботом через разработанный человеко-компьютерный интерфейс (Акдоган и Адли, 2011). Тем не менее, точная тренировка, основанная на целевом диапазоне движений пациента в суставах, способствует эффективности реабилитации конечностей пациентов. Диапазон движений в суставах, как важная оценка способности пациентов к совместной деятельности, относится к диапазону углов суставов конечностей пациентов, которым разрешено свободно двигаться.С точки зрения человеко-машинного взаимодействия реабилитационных роботов очень важно определить настройку безопасного для конечностей рабочего пространства пациента и особенно настройку защиты безопасности на уровне управления.
Традиционным методом измерения объема движений в суставах является гониометр. Он в основном состоит из трех частей: циферблатной шкалы, неподвижного рычага и вращающегося рычага. При измерении объема движений в суставе центр циферблатной шкалы должен совпадать с осью сустава человека.Традиционный гониометр легко измеряет диапазон движений сустава в сагиттальной плоскости человека. Однако трудно и неточно определить положение измерительной базы в коронарной плоскости человека. Между тем, для выполнения задачи измерения требуются два врача-реабилитолога, один для тракционного движения конечности пациента, а другой для измерения движения конечности пациента соответственно. Результат через гониометр имеет низкую точность, а также легко подвержен субъективному влиянию врача.Humac Norm — дорогой автоматический измерительный прибор. Он включает в себя множество вспомогательных узлов фиксации (Park and Seo, 2020). Во время измерения измеряемый человеческий сустав фиксируется на вспомогательном узле. Он рассчитывает диапазон движения сустава, обнаруживая изменения вспомогательного механического узла. Исследователи также провели обширные исследования метода измерения диапазона движений в суставах, объединив различные сенсорные технологии.
Инерционный датчик обычно используется для регистрации диапазона движения человеческого сустава (Beshara et al., 2020). Разработан инерционный измерительный блок для точного измерения диапазона движений коленного сустава при динамическом движении конечностей человека (Ajdaroski et al., 2020). Инструмент трехмерного захвата движения на основе инерциального датчика предназначен для записи движений коленного, тазобедренного суставов и суставов позвоночника в позе приседания на одной ноге. Он состоит из трехосного ускорителя, гироскопических и геомагнитных датчиков (Tak et al., 2020). Тойфл и др. предложили высокоэффективный трехмерный метод измерения кинематики суставов (Teufl et al., 2019). Фэн и др. разработали систему захвата движений нижних конечностей на основе датчиков ускорения, закрепивших два инерционных датчика со стороны бедра и голени человека соответственно (Feng et al. , 2016). Для роботов-экзоскелетов нижних конечностей предлагается устройство обнаружения походки, которое интегрировано с интеллектуальным датчиком в обуви и имеет компактную конструкцию и высокую практичность (Zeng et al., 2021). С развитием технологии камер технология машинного зрения также внедряется в область реабилитации человеческих конечностей (Gherman et al., 2019; Даль и др., 2020; Мавор и др., 2020). Однако для большинства систем оценки функций конечностей человека, основанных на машинном зрении, требуется комбинация камер. Трехмерные системы захвата движения с 12 камерами обеспечивают превосходную точность и надежность, но они дороги и требуют установки на большой площади (Linkel et al., 2016). В настоящее время MS Kinect (Microsoft Corp., Редмонд, Вашингтон, США) представляет собой недорогой готовый датчик движения, изначально разработанный для видеоигр, который можно адаптировать для анализа позы и баланса при выполнении упражнений (Кларк и другие., 2015). Kinect может извлекать временные и пространственные параметры походки человека, что не требует точного представления костей и сегментов конечностей человека, что решает проблему мониторинга событий, таких как риск падения пожилых людей (Dubois and Bresciani, 2018). На основе метода виртуальной триангуляции разработана система оценки движения плечевого сустава пациентов на основе датчиков Kinect V2, которая может решить решение для диапазона движений одного плечевого сустава пациентов за один раз (Cai et al., 2019; Чубукчу и др., 2020 г.; Форман и Энгсберг, 2020 г.). Однако, как повысить эффективность многосуставного измерения диапазона движений в сочетании с обучающим методом тяговой тренировки врача-реабилитолога, как с помощью одной камеры точно решить задачу многосуставной оценки пространственного движения нижних конечностей человека , и как избежать окклюзии камеры в процессе работы реабилитационных врачей, являются важной основой для точного ввода информации о движении нижних конечностей реабилитационного робота.
В этой статье предлагается метод измерения многосуставного диапазона движения нижней конечности на основе машинного зрения, и только одна камера RGB-D будет использоваться в качестве оборудования для сбора информации об изображении. Посредством анализа принципа формирования изображения камеры RGB-D устанавливается соответствующая связь между информацией об изображении и координатами в трехмерном пространстве. Маркеры расположены разумно на пациенте и реабилитационном роботе, а информация о движении суставов нижних конечностей преобразуется в информацию о движении маркеров.Затем метод пороговой сегментации и другие связанные принципы используются для завершения извлечения маркеров. Объем движений тазобедренного сустава в коронарной и сагиттальной плоскостях и объем движений коленного сустава в сагиттальной плоскости рассчитывали методом векторного произведения. Наконец, проводится эксперимент для проверки предложенного метода.
Материалы и методы
Описание пространственного движения нижних конечностей человека
Кости нижних конечностей человека соединены суставами, которые могут формировать базовую двигательную способность.Чтобы точно описать движение суставов нижних конечностей человека в сагиттальной плоскости и тазобедренного сустава в коронарной плоскости, тазобедренный сустав человека упрощен как две пары вращения, которые вращаются вокруг параллельных осей, таких как сагиттальная ось и коронарная ось. , соответственно. Коленный сустав и голеностопный сустав упрощены как одна вращательная пара, которая вращается вокруг оси, параллельной коронарной оси. Бедро, икра и стопа на нижней конечности человека упрощены как соединительные стержни. На рис. 1 представлена схема пространственного движения жесткого рычажного механизма нижних конечностей человека.Установите направление движения для вращения против часовой стрелки тазобедренного сустава и голеностопного сустава как положительное, а направление движения коленного сустава для вращения по часовой стрелке как положительное. Для описания движения тазобедренного сустава в сагиттальной плоскости за нулевой угол амплитуды движения тазобедренного сустава принята ось х , а угол θ h3 между бедром и положительной направление оси x принимается за диапазон движения тазобедренного сустава. Линия продолжения жесткой связи бедра принимается за нулевой опорный угол угла движения коленного сустава, а угол θ 2 между линией продолжения жесткой связи бедра и жесткой связи голени является диапазоном коленного сустава движение. Для амплитуды движений тазобедренного сустава во фронтальной плоскости сагиттальная плоскость принимается за нулевую плоскость отсчета, а угол между плоскостью, содержащей бедро и голень человека, и нулевой опорной плоскостью принимается за диапазон движения тазобедренного сустава. θ h2 в коронарной плоскости, в которой направление расширения наружу установлено как прямое направление движения в суставе.
Рисунок 1 . Схема пространственного движения жесткого рычажного механизма нижней конечности человека.
Абстракция информации о движении нижней конечности на основе машинного зрения
Трехмерные преобразования координат пикселей в изображении
Из-за движения конечности в трехмерном пространстве информация о глубине объекта теряется из изображения камеры RGB, а информация о плоскости масштабируется в соответствии с определенными правилами. Между тем, линзы камеры глубины и камеры RGB несовместимы, соответствующие пиксели не выровнены, поэтому информация о глубине, полученная камерой глубины, не может быть напрямую использована для цветных изображений. Необходимо проанализировать взаимосвязь между RGB-камерой и камерой глубины и определить трехмерные координаты целевого объекта путем объединения цветных изображений и изображений глубины. Модель изображения с цветной камерой на самом деле представляет собой преобразование точки из трехмерного пространства в пиксель, включающее систему координат пикселя в изображении, физическую систему координат в изображении и систему координат камеры в трехмерном пространстве. Процесс видеосъемки заключается в том, что объект в системе координат камеры в трехмерном пространстве трансформируется в пиксельную систему координат.
Как показано на рисунке 2, создается физическая система координат изображения x — o 1 — y . Началом системы координат является центр изображения, ось x параллельна направлению длины изображения, а ось y параллельна направлению ширины изображения. Система координат пикселей изображения u — o 0 — v создана. Началом системы координат является верхняя левая угловая вершина изображения, ось u параллельна оси x физической системы координат, а ось v параллельна оси y. -ось физической системы координат.Пусть точка P BE ( U P
, V P
) в пиксельной системе координат изображения и Be ( x P , y p ) в физической системе координат. Относительно координат пикселя физическая система координат масштабируется в α раз по оси u и в β раз по оси v ; относительно начала координат пиксельной системы перевод начала физической системы координат равен ( u 0 , v 0 ).По соотношению между вышеупомянутыми системами координат можно получить:
{up=αxp+u0vp=βyp+v0 (1)
Пусть фокусное расстояние объектива камеры равно f , главная оптическая ось камеры перпендикулярна плоскости изображения и проходит через O 1 , где оптический центр камеры расположен на главной оптической ось и расстояние от плоскости изображения f . Как показано на рисунке 3, система координат камеры создается с оптическим центром в качестве начала координат.Оси X и Y параллельны осям x и y системы координат изображения соответственно. Затем создается ось Z по правилу правой руки. Пусть координаты пункта p в системе координат камеры be ( x P
, Y P
, Z P ), а также соответствующие координаты проекции в физическая система координат изображения будет ( x p , y p ).В соответствии с отношением между системой координат камеры и системой координат изображения можно получить отношение:
Zpf=Xp-xp=Ypyp (2)
Знак минус в формуле указывает на то, что изображение, полученное на плоскости физического изображения, является перевернутым изображением, которое может быть перемещено к передней части камеры, а расстояние перемещения вдоль положительного направления оси Z система координат камеры 2 f . После перемещения фазовой плоскости вдоль положительного направления оси z , в соответствии с принципом формирования изображения, изображение в это время представляет собой вертикальное изображение равного размера, и уравнение (2) преобразуется в следующее:
Пусть f x = α f , f y = β f , затем по формуле (1)
[Xp/ZpYp/Zp1]=[fx0u00fyv0001]-1[upvp1] (4)
где ( x P
/ Z P
, Y P / Z P
, 1) — это проекционная точка P в нормализованной плоскости пусть K=[fx0u00fyv0001], что представляет матрицу внутренних параметров камеры.
Рисунок 2 . Пиксельная система координат изображения и физическая система координат изображения.
Рисунок 3 . Связь между системой координат камеры и физической системой координат изображения.
В реальном процессе визуализации из-за физических дефектов оптических элементов камеры и механических ошибок при установке оптических элементов изображения будут искажены. Это искажение можно разделить на радиальное искажение и тангенциальное искажение.Для любой точки нормализованной плоскости, если ее координата равна ( x, y ), а скорректированная координата будет ( x искаженная , y искаженная ), то связь между координатой точки и исправленной координата может быть описана пятью коэффициентами искажения и выражается следующим образом:
, K K 2 и K 3 — коэффициенты коррекции радиальных искажений, P 1 и P 2 – поправочные коэффициенты тангенциальной дисторсии.
Поскольку изображение глубины и цветное изображение снимаются разными камерами, они описываются в разных системах координат. Для одной и той же точки пространства их координаты несовместимы. Поскольку пиксельная система координат и система координат камеры камеры глубины и цветной камеры устанавливаются одинаково, а относительные физические положения камеры глубины и цветной камеры неизменны на одном и том же оборудовании, матрица вращения R и вектор смещения t можно использовать для преобразования координат между двумя системами координат камеры.Установите внутренний параметр камеры глубины как K d и внутренний параметр цветной камеры как K c . Пусть координаты пункта P на изображении Be ( U D
, V D ), а также глубинная стоимость точки P Z D . Пусть координаты точки p в системе координат пространства от цветной камеры be ( x y p , Z P ), затем
[XpYpZp]=R(zdK-1d[udvd1])+t (6)
Координаты в цветовой системе координат легко получить из уравнения (4), а информация о глубине добавляется к пикселям на цветовой плоскости на основе уравнения (6).
Расположение маркеров и камер RGB-D
Для повышения точности сбора информации о движении суставов используется метод захвата движения на основе маркеров. Размещая специально разработанные маркеры на сиденьях нижней конечности человека и реабилитационном роботе нижней конечности, задача получения информации о движении конечностей человека трансформируется в задачу захвата и анализа изменений пространственного положения маркеров. Информация о цвете, предоставляемая маркерами, используется в качестве объекта анализа.Поскольку углом обнаружения цели является диапазон движений тазобедренного сустава во фронтальной и сагиттальной плоскостях, а диапазон движений коленного сустава в сагиттальной плоскости, маркер устанавливается в виде цветной полоски. Маркеры нижних конечностей человека соответственно располагаются по одну сторону бедра и голени, а направление — по направлению бедра и голени. Когда угол коленного сустава равен нулю, два маркера должны быть на одной прямой. Цвет выбранного маркера должен явно отличаться от цвета фона, выберите здесь синий цвет, как показано на рисунке 4. Поскольку нулевой опорный угол тазобедренного сустава необходимо установить в сагиттальной плоскости, маркер расположен на одной стороне сиденья робота для реабилитации нижних конечностей, и его направление длины должно быть параллельно поверхности сиденья, что является нулевой точкой отсчета угла движения бедра. При размещении камеры RGB-D она должна быть обращена к сагиттальной плоскости пациента, а все маркеры должны находиться в зоне захвата камеры во время движения конечности пациента.
Рисунок 4 .Расположение камеры и маркеров.
Получение информации об изображении
При измерении амплитуды движений в суставе пациента врач-реабилитолог волочит ногу пациента в определенной форме, затем снимки собираются, как показано на рисунке 5. В этом разделе будет описан метод измерения добровольца. При измерении объема движений тазобедренного сустава в сагиттальной плоскости врач-реабилитолог должен волочить бедро пациента для движения в сагиттальной плоскости и не ограничивать состояние голени. Врачу-реабилитологу необходимо оттянуть тазобедренный сустав больного до его максимального и минимального угла движения, ограниченного в положении сидя. При измерении объема движений коленного сустава в сагиттальной плоскости тазобедренный сустав должен оставаться неподвижным. Врач-реабилитолог тащит ногу пациента, чтобы заставить икру двигаться в сагиттальной плоскости. Полученное RGB-изображение показано на рис. 6. При определении диапазона движений тазобедренного сустава в коронарной плоскости коленный сустав пациента согнут под удобным углом.Затем ногу пациента тянут, чтобы повернуть бедро в коронарной плоскости. RGB-изображение показано на рис. 7. Следует отметить, что в процессе перетаскивания маркер не должен блокироваться, чтобы не влиять на получение камерой информации об изображении.
Рисунок 7 .Измерение объема движений тазобедренного сустава во фронтальной плоскости.
Извлечение маркера на основе пороговой сегментации
После завершения получения изображения информация о движении пациента содержится в маркерах каждого кадра изображения. Задача в это время сводится к извлечению маркеров из цветных изображений. Поскольку цвет разработанного маркера явно отличается от цвета фона, информация будет использоваться в качестве основы для извлечения маркера.
Реабилитационная тренировка проводится в помещении, и свет более равномерный, и информация о разработанных маркерах будет известна, поэтому цвет маркеров в пространстве RGB можно получить заранее и справочное значение ( R 1 , G 1 , B 1 ). Получив значения RGB ( R I
, г I
, B I
) каждого пикселя в обрабованном изображении расстояние л между пикселем и может быть получено эталонное значение. Сравнивая L с установленным порогом T , пиксель, значение расстояния которого меньше установленного порога T , устанавливается равным (255, 255, 255), в противном случае он устанавливается равным (0, 0, 0) , что можно выразить следующим образом:
(R,G,B)={(0,0,0) L≤T(255,255,255) L≤T (7)
Затем изображение бинаризируется, и трехканальное изображение преобразуется в одноканальное. Когда значение пикселя равно (255, 255, 255), значение одного канала устанавливается равным 255, а когда значение пикселя равно (0, 0, 0), оно устанавливается равным 0.Затем задача извлечения маркеров завершается, как показано на рисунке 8. На нем показаны результаты бинарного изображения измерения диапазона движений тазобедренного сустава в сагиттальной плоскости, обработанного пороговой сегментацией.
Определение диапазона движений тазобедренного и коленного суставов на основе информации изображения
Установление системы координат в сагиттальной плоскости
Для движения тазобедренного и коленного суставов в сагиттальной плоскости для облегчения анализа создана система координат в сагиттальной плоскости, как показано на рисунке 4. Поскольку координаты маркеров описываются в системе координат камеры, необходимо установить отношение преобразования между системой координат и системой координат камеры. Данные изображения собираются в соответствии с режимом движения измерения диапазона движения коленного сустава способом, описанным в разделе «Получение информации об изображении», а координаты полученных маркеров на голени в системе координат камеры являются плоскими. установлены. В пиксельных координатах нескольких пикселей для участия в анализе выбирается только один пиксель, а значение глубины точки должно быть медианным значением значения глубины группы пикселей.Координаты требуемых пикселей в пиксельной системе координат в сочетании со значениями их глубины преобразуются в систему координат камеры для описания, а координата ( x i , y i , z i ) в системе координат камеры, где максимальное значение i равно k , что является количеством пикселей.
Пусть уравнение подобранной плоскости будет:
Метод наименьших квадратов используется для решения связанных неизвестных параметров, то есть для минимизации значения f ,
f=min(Σki=1(axi+byi+czi+d)2) (9)
где a 2 + b 2 + c 2 = 1, a > 0.
Принимая в качестве объекта обработки информацию маркера каждого изображения кадра, полученную выше в разделе Абстракция информации о движении нижней конечности на основе машинного зрения, координаты ( x kij , y kij , z Kij ), ( x Xij
, y Xij
, Z Xij ), а ( x Lij , y lij , z lij ) пиксельных точек маркера бедра, маркера голени и маркера на сиденье в системе координат камеры можно получить соответственно. Где j представляет количество кадров изображения, i представляет количество пикселей маркера, описанного в кадре j . Следует отметить, что диапазон значений и в трех группах координат одинаков, но диапазон значений и не одинаков. Проецируя вышеуказанные координаты на сагиттальную плоскость, координаты камеры (x′kij,y′kij,z′kij),(x′xij,y′xij,z′xij) и (x′lij,y′lij ,z′lij).
Поскольку при измерении амплитуды движений сустава взаимное положение сиденья и камеры не меняется, маркеры, размещенные на сиденье в кадре изображения, берутся за линейную подгонку.Линия монтажного пространства L должна проходить через центр тяжести (x̄, ȳ, z̄) маркера. Пусть вектор направления линии будет ( l, m, n ). Метод наименьших квадратов используется для соответствия следующему уравнению:
Единичные векторы ( u, v, w ), перпендикулярные прямой линии в плоскости, могут быть получены из полученных векторов направления ( l, m, n ) и уравнения подобранной плоскости, где v есть неотрицательное значение. Возьмите одну точку ( x o , y o , z o ) в плоскости в качестве начала координат, ) — положительное направление оси x , а направление единичного вектора ( u, v, w ) — положительное направление оси y . Математическое описание оси z определяется правилом правой руки.На данный момент установление системы координат x-o-y-z завершено. Координаты (x′kij,y′kij,z′kij), (x′xij,y′xij,z′xij) и (x′lij,y′lij,z′lij) в системе координат камеры равны преобразуется в систему координат xoyz , а координаты преобразуются в (x″ki1,y″ki1,0),(x″xi1,y″xi1,0) и (x″li1,y″li1,0 ). Поскольку значение z каждой координаты равно 0, трехмерная координатная задача была преобразована в двумерную в системе координат x-o-y .
Определение объема движений тазобедренного и коленного суставов в сагиттальной плоскости
Маркеры на бедре и голени в каждом кадре основаны на методе наименьших квадратов. Возьмите любой маркер на бедре на изображении в качестве примера для анализа. Пусть подобранное линейное уравнение будет:
Метод наименьших квадратов используется для решения параметров a, b и c , то есть для минимизации значения полинома Σki=1(axki1-byki1+c)2, и имеется ограничение а 2 + б 2 = 1.Мы можем получить коэффициенты K
и x и 9 и K
y , то есть направление вектор E K = ( B K , a k ) прямой линии получается. Аналогичным образом, направление вектор e x
= ( 9 x x x x
E l
= ( b l , a l ), представляющие линию подгонки маркера голени и маркера сиденья, соответственно, также могут быть получены. Параметры b k , b x и b l неотрицательны
θk={arccosec·el|ek||el|(el×ek≥0)-arccosec·el|ek||el|(el×ek<0) (13)
Используя один и тот же метод обработки, можно получить углы тазобедренных и коленных суставов в разных кадрах.Пусть угол тазобедренного сустава в кадре j равен θ kj , а угол коленного сустава в кадре j равен θ xj . Тогда можно получить максимум и минимум угла θ kj (1 ≤ j ≤ k ), которые будут определены как θ k max и , соответственно; также могут быть достигнуты максимум и минимум угла θ xj (1 ≤ j ≤ k ), которые будут определены как θ x max, и соответственно.
Определение объема движений тазобедренного сустава во фронтальной плоскости
При измерении объема движений тазобедренного сустава пациента во фронтальной плоскости плоскость бедра и голени пациента в начале параллельна стороне кресла, то есть угол тазобедренного сустава во фронтальной плоскости составляет 0 градусов. По вышеописанным методам изображения собираются и обрабатываются, и маркеры на бедре и голени каждого кадра подгоняются по формуле (11), а векторы нормалей e j = ( a j , b j , c j ) каждой плоскости, где j – количество кадров изображения.Угол движения тазобедренного сустава во фронтальной плоскости: 9000.
θj=arccos|ej·e1||ej|·|e1| (15)
Пусть угол тазобедренного сустава в коронарной плоскости кадра j равен θ кгj , максимальное и минимальное значения θ кгj (1 ≤ j ≤ k получено, которое может быть установлено как θ кг max и θ кг min соответственно.
Результаты
Эксперимент по прецизионной проверке предлагаемой системы обнаружения
Для проверки возможности реализации предложенного метода на базе RGB-D камеры для определения дальности движения суставов конечностей пациентов с учетом частоты кадров, разрешения и точности камер была использована камера L515 производства компании Intel (Калифорния, США). ), выбирается.Разрешение цветного изображения и изображения глубины камеры может достигать 1280 * 720, а частота кадров может достигать 30 кадров в секунду. Поскольку для эксперимента необходимо получить информацию о координатах маркера в трехмерном пространстве, точность информации о глубине будет иметь прямое влияние на точность системы обнаружения. Точность камеры L515 составляет <5 мм на расстоянии 1 м и <14 мм на расстоянии 9 м. Необходимо следить за тем, чтобы камера могла фиксировать маркеры во время движения конечности пациента, а расстояние между камерой и пораженной конечностью равнялось 0.8–1,5 м. Поскольку контрольная группа не может быть точно установлена, чтобы доказать правильность угла, измеренного в эксперименте с нижней конечностью человека, механическая нога, заменившая нижнюю конечность человека, адаптирована, как показано на рисунке 9.
Рисунок 9 . Прототип робота с двумя механическими ногами. (А) Прототип робота; (B) Конструкция механической ноги.
Разработанная система обнаружения движения суставов должна обеспечивать диапазон обнаружения движения тазобедренного и коленного суставов в сагиттальной плоскости.Бедро и икру механической ноги можно рассматривать как два шатуна, которые соединены вращающимися парами, а маркеры установлены соответственно на бедре и голени с одной стороны механической ноги. Углы движения тазобедренного и коленного суставов в сагиттальной плоскости представлены углами между линиями, нанесенными на полоски. Датчики угла WT61C устанавливаются на бедро и икру на механической ноге для получения углов в реальном времени, а данные от датчиков угла используются в качестве контрольной группы.Точность динамического измерения датчика угла (WT61C) составляет 0,1 градуса, а выходными данными будут время и угол.
Красные полоски используются для обозначения цвета маркеров, как показано на рисунке 10. Анализируются и получаются углы между линией, совпадающей с маркером на механической голени, и линией, совпадающей с маркером на механическом бедре. Чтобы проверить повторяющуюся точность разработанной системы обнаружения движения сустава в сагиттальной плоскости, икра предназначена для многократных движений вперед и назад, в то время как бедро неподвижно, и максимальное и минимальное значения угла движения в каждом движения вперед и назад определяются случайным образом.Конкретные данные показаны на рисунке 11А. Соответствующие пиковые значения углов, полученные двумя вышеуказанными способами во времени, анализируются здесь, и результаты анализа показаны на рисунке 11B.
Рисунок 10 . Настройка экспериментальной сцены. (A) Экспериментальная установка в сагиттальной плоскости; (B) Экспериментальная установка во фронтальной плоскости.
Рисунок 11 . Результаты совместной системы определения диапазона движения для суставов в сагиттальной плоскости. (А) Определение угла движения в сагиттальной плоскости; (B) Диаграмма ошибок между контрольной и экспериментальной группами для сравнения в сагиттальной плоскости.
Метод измерения объема движений тазобедренного сустава во фронтальной плоскости по существу основан на плоскостной подгонке двух линий-маркеров под определенным углом. Сначала полученная установочная плоскость используется в качестве базовой плоскости измерения; по мере продолжения измерения снова получается угол между новой установочной плоскостью и базовой плоскостью измерения, то есть решение, представляющее диапазон движения тазобедренного сустава в коронарной плоскости.Разработанная система определения диапазона движения сустава также использует упомянутую выше механическую ногу для проверки диапазона движения сустава в коронарной плоскости. Расположение маркеров показано на рисунке 10B. В эксперименте ось колена механической ноги эквивалентна оси тазобедренного сустава человека в коронарной плоскости. Икра механической ноги эквивалентна нижней конечности человека. Теленок механической ноги предназначен для многократных движений вокруг оси вращения коленного сустава, в то время как бедро неподвижно, а информация о данных угловых датчиков и камеры RGB-D собирается синхронно. Чтобы предотвратить ошибку определения максимального угла, вызванную возможной импульсной интерференцией, для полученных углов движения в коронарной плоскости выполняется обработка фильтрации среднего значения медианы, и результат показан на фиг. 12А. Соответствующие пиковые значения углов, полученные двумя вышеуказанными способами во времени, анализируются, и результаты анализа показаны на фигуре 12В.
Рисунок 12 . Результаты совместной системы обнаружения движения для суставов в коронарной плоскости. (A) Определение угла движения во фронтальной плоскости; (B) Диаграмма ошибок между контрольной и экспериментальной группами для сравнения в коронарной плоскости.
Обсуждение
В эксперименте по проверке точности предлагаемой системы обнаружения информация об угле, полученная предлагаемой системой обнаружения, в значительной степени согласуется с информацией об угле, полученной датчиком угла (WT61C), который проверяет правильность совместного диапазона системы обнаружения движения в сагиттальной плоскости и коронарной плоскости. При измерении объема движений в суставах в сагиттальной плоскости речь идет о максимальном и минимальном значениях измеряемых суставных углов. Поэтому здесь анализируются соответствующие пиковые значения углов, полученные предлагаемым способом и способом через датчик угла (WT61C) во времени, и результаты анализа показаны на рисунке 11B. Он показывает разницу δ между углом на пике, полученным предлагаемой системой обнаружения и датчиком угла. Из рисунка 11Б видно, что угол в сагиттальной плоскости, измеренный разработанной предлагаемой системой обнаружения, является относительно консервативным, а максимальная ошибка измерения не превышает 2.2 степени. Он также показывает разницу δ в коронарной плоскости между углом на пике, полученным предлагаемой системой обнаружения и датчиком угла. Из рисунка 12Б видно, что максимальная погрешность измерения между углом, измеренным предлагаемой системой обнаружения, и датчиком угла составляет не более 2,65 градуса.
Насколько нам известно, ни одно исследование не изучало машинную версию для достижения многосуставной оценки пространственного движения нижних конечностей человека. Большинство исследований сосредоточено на параметрах походки и методе их оценки с использованием системы OptiTrack и Kinect, таких как длина шага, продолжительность шага, частота шагов и скорость ходьбы, чьи сообщения отличаются от нашего исследования.Анализы надежности и достоверности системы измерения движений плеч на основе Kinect V2 исследовались в литературе (Çubukçu et al., 2020). Средние отличия клинического гониометра от измерительной системы на базе Kinect V2 (MDCGK), средние отличия цифрового гониометра от измерительной системы на базе Kinect V2 (MDDGK) и средние отличия углового датчика от предложенного метода на основе камеры L515 (MDALC) показаны в таблице 1. По сравнению с эффективностью измерения коронарного отведения и приведения и сагиттального сгибания и разгибания плеча предлагаемая система измерения пространственного движения нижних конечностей на основе камеры L515 также имеет хорошую относительную эффективность.
Таблица 1 . Средние различия с помощью различных методов обнаружения.
По сравнению с другими методами с помощью инерционных датчиков предлагаемый метод значительно упрощает получение суставного объема движений. В плане операции удобнее оперировать реабилитологам. Для пациентов с ограниченными физическими возможностями установка меток только на бедре и голени человека не заставит пациента сильно изменить свою осанку. Эта статья обеспечивает основу для важных параметров будущего робота для реабилитации нижних конечностей, чтобы установить диапазон движения каждого сустава, ограниченный безопасным рабочим пространством пациента.
Заключение
В этом документе предложена новая система обнаружения, используемая для сбора данных перед пациентами, участвующими в обучении реабилитационного робота, чтобы гарантировать, что реабилитационный робот не чрезмерно растягивает какой-либо сустав пациентов, перенесших инсульт. Изучается сопоставление между системой координат камеры и системой координат пикселей в изображении камеры RGB-D, где моделируется диапазон движения бедра и сустава, коленного сустава в сагиттальной плоскости и тазобедренного сустава во фронтальной плоскости через анализ методом наименьших квадратов. Проведен сценический эксперимент с человеком в петле, результаты которого подтверждают эффективность предложенного метода. Однако, учитывая сложность строения скелетных мышц нижних конечностей человека, в качестве объекта исследования в данной работе использовалось обычное жесткое тело реабилитационной механической ноги. Поэтому при практическом клиническом применении, особенно у больных с дисфункциональными конечностями, до сих пор предъявляются высокие требования к положению и форме оклейки мейкеров. Поскольку расположение производителей, однородность собственной формы и интенсивность света в процессе измерения также будут влиять на результаты измерений.В дальнейшем мы будем дополнительно изучать направления подразделения, такие как однородность производителей, интенсивность света камеры и клинические испытания.
Заявление о доступности данных
Оригинальные материалы, представленные в исследовании, включены в статью/дополнительный материал, дальнейшие запросы можно направлять соответствующим авторам.
Заявление об этике
Исследования с участием людей были рассмотрены и одобрены Комитетом по этике факультета машиностроения и механики Университета Нинбо.Пациенты/участники предоставили письменное информированное согласие на участие в этом исследовании.
Вклад авторов
YF: концептуализация и формальный анализ. XW: методология. ГЛ: программное обеспечение. JN и WL: проверка. ЗГ: исследование, ресурсы, визуализация и надзор, администрирование проекта. XW: написание — подготовка первоначального проекта. YF и ZG: написание — обзор, редактирование и финансирование приобретения. Все авторы прочитали и согласились с опубликованной версией рукописи и согласны нести ответственность за содержание работы.
Финансирование
Это исследование финансировалось Шанхайским муниципальным крупным научно-техническим проектом, номер гранта 2021SHZDZX0103; Фонд естественных наук провинции Чжэцзян, номер гранта LQ21E050008; Комиссия по образованию провинции Чжэцзян, номер гранта Y201941335; Фонд естественных наук города Нинбо, номер гранта 2019A610110; Крупные научно-технические проекты в городе Нинбо, номер гранта: 2020Z082; Проект исследовательского фонда Университета Нинбо, номер гранта XYL19029; и К. C.Wong Magna Fund в Университете Нинбо, Китай.
Конфликт интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могли бы быть истолкованы как потенциальный конфликт интересов.
Примечание издателя
Все претензии, изложенные в этой статье, принадлежат исключительно авторам и не обязательно представляют претензии их дочерних организаций или издателя, редакторов и рецензентов.Любой продукт, который может быть оценен в этой статье, или претензии, которые могут быть сделаны его производителем, не гарантируются и не поддерживаются издателем.
Каталожные номера
Айдароски М., Тадакала Р., Николс Л. и Эскивель А. (2020). Валидация устройства для измерения углов коленного сустава при динамическом движении. Датчики 20:1747. doi: 10.3390/s20061747
Резюме PubMed | Полный текст перекрестной ссылки | Академия Google
Акдоган, Э., и Адли, М. А. (2011).Разработка и управление роботом лечебной физкультуры для реабилитации нижних конечностей: физиотерапевт. Мехатроника 21, 509–522. doi: 10.1016/j.mechatronics.2011.01.005
Полнотекстовая перекрестная ссылка | Академия Google
Бешара П., Чен Дж. Ф., Рид А. К., Лагадек П., Ван Т. и Уолш В. Р. (2020). Надежность и достоверность носимых инерциальных датчиков в сочетании с Microsoft Kinect для измерения диапазона движения плеча. Датчики 20:7238. дои: 10.3390/с20247238
Резюме PubMed | Полный текст перекрестной ссылки | Академия Google
Цай, Л.С., Ма, Ю., Сюн, С., и Чжан, Ю.С. (2019). Валидность и надежность функциональной оценки верхних конечностей с использованием сенсора Microsoft Kinect V2. Заяв. Бионикс Биомех . 2019, 1–14. дои: 10.1155/2019/7175240
Резюме PubMed | Полный текст перекрестной ссылки | Академия Google
Сеспедес, Н., Райгосо, Д., Мунера, М., и Сифуэнтес, К.А. (2021). Долгосрочное социальное взаимодействие человека и робота для нейрореабилитации: роботы как инструмент поддержки терапии походки в условиях пандемии. Перед. Нейроробот . 15, 1–12. doi: 10.3389/fnbot.2021.612034
Резюме PubMed | Полный текст перекрестной ссылки | Академия Google
Clark, R.A., Vernon, S., Mentiplay, B.F., Miller, K.J., McGinley, J.L., Pua, Y.H., et al. (2015). Инструментальная оценка походки с помощью Kinect у людей, перенесших инсульт: надежность и связь с тестами на равновесие. Дж. Нейроинж. Реабилитация . 12, 1–9. doi: 10.1186/s12984-015-0006-8
Резюме PubMed | Полный текст перекрестной ссылки | Академия Google
Коулман, Э.R., Moudgal, R., Lang, K., Hyacinth, H.I., Awosika, O.O., Kissela, B.M., et al. (2017). Ранняя реабилитация после инсульта: описательный обзор. Курс. Атеросклероз. Респ. . 30, 48–54. doi: 10.1007/s11883-017-0686-6
Резюме PubMed | Полный текст перекрестной ссылки | Академия Google
Чубукчу, Б., Юзгеч, У., Зилели, Р., и Зилели, А. (2020). Анализ надежности и достоверности системы измерения движения плеч на основе Kinect V2. Мед. англ. Физ . 76, 20–31.doi: 10.1016/j.medengphy.2019.10.017
Резюме PubMed | Полный текст перекрестной ссылки | Академия Google
Даль, К.Д., Данфорд, К.М., Уилсон, С.А., Тернбулл, Т.Л. (2020). Носимый датчик для проверки связанных со спортом движений нижних конечностей и туловища. Мед. англ. Физ . 84, 144–150. doi: 10.1016/j.medengphy.2020.08.001
Резюме PubMed | Полный текст перекрестной ссылки | Академия Google
Дэн С., Цай К.Ю., Чжан З. и Ву Х.Д. (2021a).Анализ поведения пользователей на основе многоуровневого автоэнкодера и кластеризации в сложной среде энергосистемы. IEEE T Intel Transp . 1–15. doi: 10.1109/TITS.2021.3076607
Полнотекстовая перекрестная ссылка | Академия Google
Дэн С., Чен Ф. Л., Донг С., Гао Г. В. и Ву С. (2021b). Краткосрочное прогнозирование нагрузки с использованием улучшенного GEP и распознавания аномальной нагрузки. ACM T Интернет Техн. 21, 1–28. дои: 10.1145/3447513
Полнотекстовая перекрестная ссылка | Академия Google
Д’Онофрио, Г. , Fiorini, L., Hoshino, H., Matsumori, A., Okabe, Y., Tsukamoto, M., et al. (2019). Вспомогательные роботы для социализации пожилых людей: результаты, относящиеся к потребностям пользователей. Клиника старения. Эксп. Рез . 31, 1313–1329. doi: 10.1007/s40520-018-1073-z
Резюме PubMed | Полный текст перекрестной ссылки | Академия Google
Доост, М.Ю., Герман, Б., Денис, А., Спейн, Дж., Галински, Д., Рига, А., и соавт. (2021). Бимануальное обучение двигательным навыкам и роботизированная помощь при хроническом гемипаретическом инсульте: рандомизированное контролируемое исследование. Нейронная регенерация. Рез . 16, 1566–1573. дои: 10.4103/1673-5374.301030
Резюме PubMed | Полный текст перекрестной ссылки | Академия Google
Эзаки С., Кадоне Х., Кубота С., Абэ Т., Симидзу Ю., Тан С.К. и др. (2021). Анализ изменений двигательной походки при вмешательстве с использованием гибридной вспомогательной конечности (HAL) роботизированного костюма у пациентов с миелопатией после декомпрессионной операции по поводу окостенения задней продольной связки. Перед. Нейроробот . 15, 1–13. doi: 10.3389/fnbot.2021.650118
Резюме PubMed | Полный текст перекрестной ссылки | Академия Google
Фэн, Ю. Ф., Ван, Х. Б., Лу, Т., Владареанув, В., Ли, К., и Чжао, К. С. (2016). Методика обучения реабилитационного робота нижних конечностей. Междунар. Дж. Адв. Система роботов . 13, 1–10. дои: 10.5772/62058
Полнотекстовая перекрестная ссылка | Академия Google
Форман, М. Х., и Энгсберг, Дж. Р. (2020). Валидность и надежность Microsoft Kinect для измерения компенсации ствола во время достижения. Датчики 20:7073. дои: 10.3390/s20247073
Резюме PubMed | Полный текст перекрестной ссылки | Академия Google
Гассерт, Р., и Дитц, В. (2018). Реабилитационные роботы для лечения сенсомоторных нарушений: нейрофизиологическая перспектива. Дж. Нейроинж. Реабилитация . 15, 1–15. doi: 10.1186/s12984-018-0383-x
Резюме PubMed | Полный текст перекрестной ссылки | Академия Google
Герман Б. , Бирлеску И., Плитеа Н., Карбоне Г., Тарнита Д. и Писла Д.(2019). О свободном от сингулярностей рабочем пространстве параллельного робота для реабилитации нижних конечностей. Проц. Румынский акад. сер. А 20, 383–391.
Академия Google
Хоббс, Б., и Артемиадис, П. (2020). Обзор роботизированной терапии инсульта нижних конечностей: неизведанные пути и будущие направления в реабилитации походки. Перед. Нейроробот . 14, 1–16. doi: 10.3389/fnbot.2020.00019
Резюме PubMed | Полный текст перекрестной ссылки | Академия Google
Ли, Х.Ю., Парк, Дж. Х., и Ким, Т. В. (2021). Сравнение роботизированной тренировки ходьбы Locomat и Walkbot в отношении равновесия и функции нижних конечностей среди выживших после неамбулаторных хронических приобретенных травм головного мозга. Медицина 100:e25125. дои: 10.1097/MD.0000000000025125
Резюме PubMed | Полный текст перекрестной ссылки | Академия Google
Лян, X., и Су, Т. Т. (2019). Планирование траектории дельта-робота с заданным геометрическим ограничением на основе кривых Пифагора-годографа пятой степени. Заяв. науч. Базель 9:4491. дои: 10.3390/app9214491
Полнотекстовая перекрестная ссылка | Академия Google
Линкель, А., Гришкевичюс, Дж., и Дауноравичене, К. (2016). Объективная оценка движений верхних конечностей здорового человека. J. Вибрация . 18, 5473–5480. doi: 10.21595/jve.2016.17679
Полнотекстовая перекрестная ссылка | Академия Google
Маджо, М. Г., Наро, А., Манули, А., Мареска, Г., Баллетта, Т., Лателла, Д., и др. (2021). Влияние роботизированной нейрореабилитации на представление тела у людей с инсультом: предварительное исследование, посвященное подходу на основе ЭЭГ. Мозговой топогр . 34, 348–362. doi: 10.1007/s10548-021-00825-5
Резюме PubMed | Полный текст перекрестной ссылки | Академия Google
Су, Т. Т., Ченг, Л., Ван, Ю. К., Лян, X., Чжэн, Дж., и Чжан, Х. Дж. (2018). Оптимальное по времени планирование траектории для дельта-робота на основе годографа Пифагора пятой степени. Доступ IEEE . 6, 28530–28539. дои: 10.1109/ДОСТУП.2018.2831663
Полнотекстовая перекрестная ссылка | Академия Google
Так, И., Вирц, В.П., Барендрехт М. и Лангхут Р. (2020). Валидность нового инструмента трехмерного анализа движения для оценки углов коленного, тазобедренного и позвоночного суставов во время приседаний на одной ноге. Датчики 20:4539. doi: 10.3390/s20164539
Резюме PubMed | Полный текст перекрестной ссылки | Академия Google
Тан К., Кояма С., Сакураи Х., Танабэ С., Канада Ю. и Танабэ С. (2020). Носимый роботизированный экзоскелет для восстановления походки у пациентов с травмой спинного мозга: обзор литературы. Дж. Ортоп. Перевод . 28, 55–64. doi: 10.1016/j.jot.2021.01.001
Резюме PubMed | Полный текст перекрестной ссылки | Академия Google
Тойфль В., Мизаль М., Таец Б., Фрёлих М. и Блезер Г. (2019). Достоверность трехмерной кинематики суставов на основе инерциальных датчиков статических и динамических спортивных и физиотерапевтических движений. PLoS ONE 14:e0213064. doi: 10.1371/journal.pone.0213064
Резюме PubMed | Полный текст перекрестной ссылки | Академия Google
Тиан Ю., Wang, H.B., Zhang, Y.S., Su, B.W., Wang, L.P., Wang, X.S., et al. (2021). Разработка и оценка новой системы помощи при перемещении человека. Доступ IEEE . 9, 14306–14318. doi: 10.1109/ACCESS.2021.3051677
Полнотекстовая перекрестная ссылка | Академия Google
van Kammen, K., Reinders-Messelink, H.A., Elsinghorst, A.L., Wesselink, C.F., Meeuwisse-de Vries, B., van der Woude, L.H.V., et al. (2021). Амплитуда и пошаговая вариабельность мышечной активности при ходьбе под руководством Локомата и ходьбе на беговой дорожке у детей с детским церебральным параличом. евро. Дж. Педиатр. Нейро . 29, 108–117. doi: 10.1016/j.ejpn.2020.08.003
Резюме PubMed | Полный текст перекрестной ссылки | Академия Google
Ван Л.Д., Лю Дж.М., Ян Ю., Пэн Б. и Ван Ю.Л. (2019). Профилактика и лечение инсульта по-прежнему сталкиваются с огромными проблемами — краткий отчет о профилактике и лечении инсульта в Китае, 2018 г. Подбородок. Цирк. Дж . 34, 105–119. doi: 10.3969/j.issn.1000-3614.2019.02.001
Полнотекстовая перекрестная ссылка
Ву, Д., Luo, X., Shang, M.S., He, Y., Wang, G.Y., и Wu, X.D. (2020). Модель скрытого фактора с учетом характеристик данных для прогнозирования QoS веб-службы. Знания IEEE T. Данные EN . 1–12. doi: 10.1109/ТКДЭ.2020.3014302
Полнотекстовая перекрестная ссылка | Академия Google
Ву, Д., Ло, X., Шан, М.С., Хе, Ю., Ван, Г.Я., и Чжоу, М.К. (2021a). Модель глубокого скрытого фактора для многомерных и разреженных матриц в рекомендательных системах. IEEE Transac. Сист. Человек Кибернет. Сист. 51, 4285–4296. дои: 10.1109/TSMC.2019.2931393
Полнотекстовая перекрестная ссылка | Академия Google
Ву, Д., Луо, X., Ван, Г. Ю., Шан, М. С., Юань, Ю. и Ян, Х. Ю. (2018). Высокоточная структура для полуконтролируемой классификации с самомаркировкой в промышленных приложениях. IEEE T Ind. Inform . 14, 909–920. дои: 10.1109/ТИИ.2017.2737827
Полнотекстовая перекрестная ссылка | Академия Google
Ву, Д., Шан, М.С., Луо, X., и Ван, З.Д. (2021b).L1-and-L 2 -норм-ориентированная модель скрытого фактора для рекомендательных систем. IEEE T Нейр. Чистый Лир . 1–14. doi: 10.1109/TNNLS.2021.3071392
Резюме PubMed | Полный текст перекрестной ссылки | Академия Google
Цзэн Д.З., Цюй С.Х., Ма Т., Цюй С., Инь П., Чжао Н. и др. (2021). Исследование системы обнаружения походки и алгоритма распознавания для робота-экзоскелета нижних конечностей. Дж. Браз. соц. мех. Наука . 43:298. doi: 10.1007/s40430-021-03016-2
Полнотекстовая перекрестная ссылка | Академия Google

 ), выявленных при визуальном контроле;
), выявленных при визуальном контроле; ), выявленных при визуальном контроле;
), выявленных при визуальном контроле; Контроль заключается в визуальном осмотре объекта как невооруженным глазом, так и с помощью спецсредств. Осмотром выявляются зоны с дефектами, а последующим измерением определяется допустимость обнаруженных дефектов, их соответствие нормам технической документации на приемку изделия. Визуальный и измерительный контроль сварных соединений при сборке под сварку заключается в обеспечении соответствия формы и размеров кромок, чистоты поверхностей, величин зазоров, в исключении возможных смещений кромок и других отклонений от пространственного расположения свариваемых элементов.
Контроль заключается в визуальном осмотре объекта как невооруженным глазом, так и с помощью спецсредств. Осмотром выявляются зоны с дефектами, а последующим измерением определяется допустимость обнаруженных дефектов, их соответствие нормам технической документации на приемку изделия. Визуальный и измерительный контроль сварных соединений при сборке под сварку заключается в обеспечении соответствия формы и размеров кромок, чистоты поверхностей, величин зазоров, в исключении возможных смещений кромок и других отклонений от пространственного расположения свариваемых элементов.
 ).
).  Такие профессионалы понимают причины возникновения дефекта, а также способы предупреждения. Кроме того, могут дать рекомендации по эффективному устранению обнаруженного дефекта, качественному ремонту.
Такие профессионалы понимают причины возникновения дефекта, а также способы предупреждения. Кроме того, могут дать рекомендации по эффективному устранению обнаруженного дефекта, качественному ремонту.
 ч. по истечении расчетного срока службы изделия.
ч. по истечении расчетного срока службы изделия.


 №1192).
№1192).
 ru. У нас самая выгодная цена на комплекты ВИК!
ru. У нас самая выгодная цена на комплекты ВИК! Визуальный контроль качества сварных швов — предварительный этап, перед проведением приборных методов исследований.
Визуальный контроль качества сварных швов — предварительный этап, перед проведением приборных методов исследований.
 Однако, следует отметить, что данное обследование, является предварительным и не может заменить более предметных методов аппаратного неразрушающего контроля.
Однако, следует отметить, что данное обследование, является предварительным и не может заменить более предметных методов аппаратного неразрушающего контроля.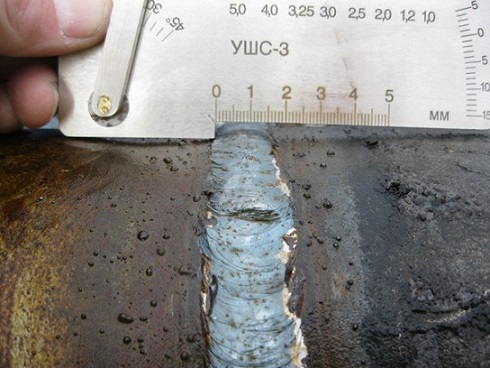
 com
com  Тепловизор можно использовать для поиска утечек в подземных трубах или трубах, находящихся внутри стен (например, в зданиях, где невозможен непосредственный визуальный осмотр), а также для анализа энергоэффективности жилья.Cámaras termográficas para la inspección visual
Тепловизор можно использовать для поиска утечек в подземных трубах или трубах, находящихся внутри стен (например, в зданиях, где невозможен непосредственный визуальный осмотр), а также для анализа энергоэффективности жилья.Cámaras termográficas para la inspección visual Ошибки монтажа SMD (Survace Mounting Device) можно легко обнаружить с помощью этих устройств.Вы также можете использовать этот тип визуального осмотра, чтобы проверить, есть ли на поверхности материалов царапины или трещины.
Ошибки монтажа SMD (Survace Mounting Device) можно легко обнаружить с помощью этих устройств.Вы также можете использовать этот тип визуального осмотра, чтобы проверить, есть ли на поверхности материалов царапины или трещины. Бесконтактная измерительная система видеокомпаратора (VMS-840XY)
Бесконтактная измерительная система видеокомпаратора (VMS-840XY) Однако с помощью созданных лазером трехмерных изображений, похожих на голограммы, вспыхивающих в светочувствительную смолу, исследователи из Ливерморской национальной лаборатории (LLNL), , вместе с сотрудниками из Калифорнийского университета в Беркли , Университета Рочестера и Массачусетса. Технологический институт (MIT) занимается созданием сложных 3D-деталей в кратчайшие сроки.
Однако с помощью созданных лазером трехмерных изображений, похожих на голограммы, вспыхивающих в светочувствительную смолу, исследователи из Ливерморской национальной лаборатории (LLNL), , вместе с сотрудниками из Калифорнийского университета в Беркли , Университета Рочестера и Массачусетса. Технологический институт (MIT) занимается созданием сложных 3D-деталей в кратчайшие сроки. Лазерный свет с более высокой интенсивностью в месте пересечения лучей остается включенным в течение примерно 10 секунд для отверждения детали. Излишки смолы стекают из ванны, оставляя полностью сформированную трехмерную деталь.
Лазерный свет с более высокой интенсивностью в месте пересечения лучей остается включенным в течение примерно 10 секунд для отверждения детали. Излишки смолы стекают из ванны, оставляя полностью сформированную трехмерную деталь.

 В сцене есть дополнительный инструмент для измерения вертикальных расстояний.
В сцене есть дополнительный инструмент для измерения вертикальных расстояний.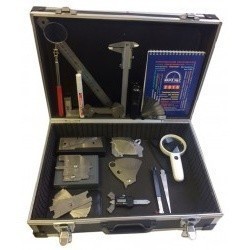



 Например, вы можете установить единицы для общей площади, а также единицы, возвращаемые для каждого сегмента полигона, используемого для расчета площади.
Например, вы можете установить единицы для общей площади, а также единицы, возвращаемые для каждого сегмента полигона, используемого для расчета площади.
 Метки для расстояний смещения по вертикали и расстояний 2D также отображаются там, где это применимо. Динамическая горизонтальная лазерная линия показывает сравнительные высоты по всему виду.Когда вы наводите курсор на стрелку компонента высоты, вы можете ограничить расстояние
измерения по вертикали, что означает, что измерение остается в направлении Y только при перетаскивании стрелки
перпендикулярно первому щелчку сегмента. Если мышь движется
достаточно далеко от вертикали, он возвращается к измерению в
полный 3D дистанционный режим.
Метки для расстояний смещения по вертикали и расстояний 2D также отображаются там, где это применимо. Динамическая горизонтальная лазерная линия показывает сравнительные высоты по всему виду.Когда вы наводите курсор на стрелку компонента высоты, вы можете ограничить расстояние
измерения по вертикали, что означает, что измерение остается в направлении Y только при перетаскивании стрелки
перпендикулярно первому щелчку сегмента. Если мышь движется
достаточно далеко от вертикали, он возвращается к измерению в
полный 3D дистанционный режим. Отпустите клавишу C, чтобы продолжить измерение.
Отпустите клавишу C, чтобы продолжить измерение.
 Это также известно как большой круг, когда используется сфера.Большой эллиптический тип позволяет вам создавать только линии.
Это также известно как большой круг, когда используется сфера.Большой эллиптический тип позволяет вам создавать только линии.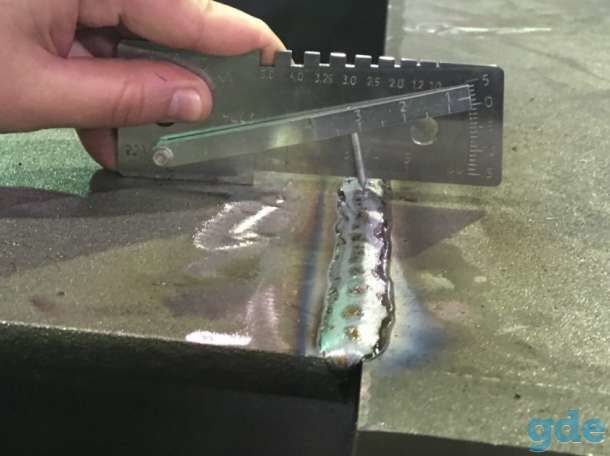 При необходимости используйте раскрывающееся меню в окне «Измерение», чтобы изменить единицы измерения.
При необходимости используйте раскрывающееся меню в окне «Измерение», чтобы изменить единицы измерения. Эти значения отображаются в нижней части вида рядом с отображением координат.
Эти значения отображаются в нижней части вида рядом с отображением координат. Политика конфиденциальности.
Политика конфиденциальности.
 Он создается путем подсчета количества различных путей кода в потоке программы. Программа со сложным потоком управления требует большего количества тестов для достижения хорошего покрытия кода и менее удобна в сопровождении. Для получения дополнительной информации см. статью Википедии о цикломатической сложности.
Он создается путем подсчета количества различных путей кода в потоке программы. Программа со сложным потоком управления требует большего количества тестов для достижения хорошего покрытия кода и менее удобна в сопровождении. Для получения дополнительной информации см. статью Википедии о цикломатической сложности. Хороший дизайн программного обеспечения требует, чтобы типы и методы имели высокую связность и низкую связанность. Высокая связанность указывает на то, что дизайн сложно повторно использовать и поддерживать из-за его многочисленных взаимозависимостей от других типов. Дополнительные сведения см. в разделе Связывание классов.
Хороший дизайн программного обеспечения требует, чтобы типы и методы имели высокую связность и низкую связанность. Высокая связанность указывает на то, что дизайн сложно повторно использовать и поддерживать из-за его многочисленных взаимозависимостей от других типов. Дополнительные сведения см. в разделе Связывание классов.
 В основном Code Metrics игнорирует сгенерированный код при вычислении значений метрик. Это позволяет значениям показателей отражать то, что разработчик может видеть и изменять.
В основном Code Metrics игнорирует сгенерированный код при вычислении значений метрик. Это позволяет значениям показателей отражать то, что разработчик может видеть и изменять.
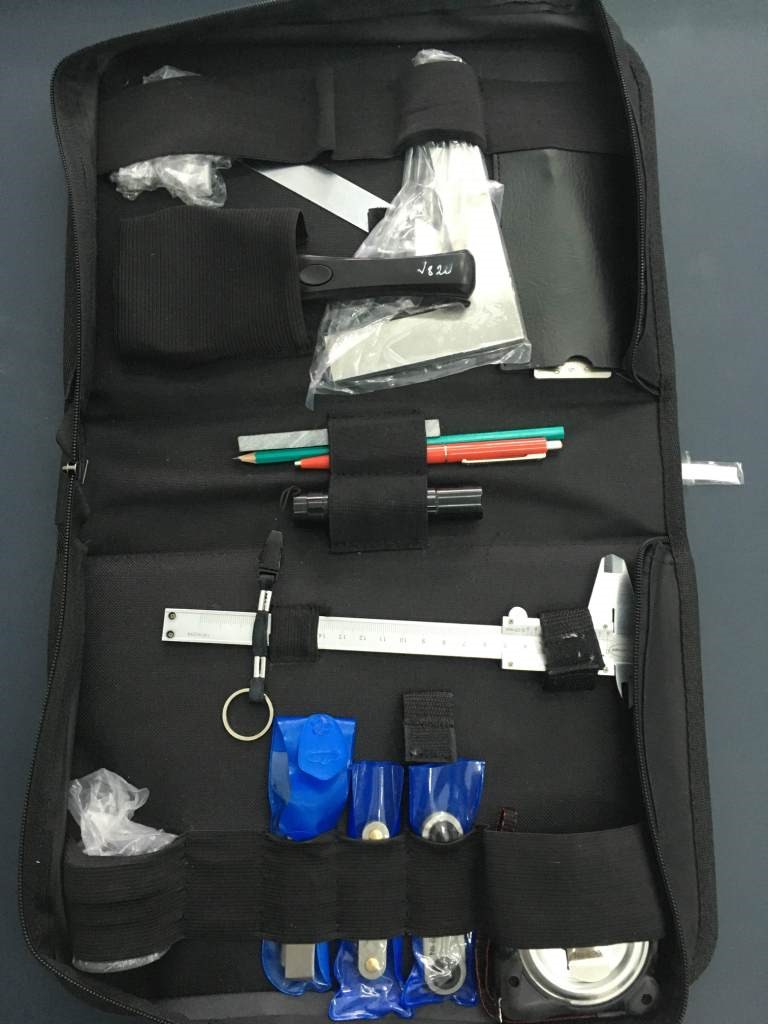 Для установки в стандартные погружные трубы или в байпасную линию технологического потока.Использование в аэротенках очистных сооружений, гидротехнических сооружений, в рыбоводстве или для мониторинга поверхностных вод. Минимальное обслуживание благодаря визуальному принципу измерения.
Для установки в стандартные погружные трубы или в байпасную линию технологического потока.Использование в аэротенках очистных сооружений, гидротехнических сооружений, в рыбоводстве или для мониторинга поверхностных вод. Минимальное обслуживание благодаря визуальному принципу измерения. 1 мг / л
1 мг / л .. 20 мА Отправлено на измерительный диапазон, корректирован температуру, калиброванные и электрически изолированные
.. 20 мА Отправлено на измерительный диапазон, корректирован температуру, калиброванные и электрически изолированные Отображаемые единицы: [ppm] и [% насыщения кислородом]DACa, AEGIS II, D1C: Калибровка возможна только в том случае, если вводится эталонная концентрация, определенная по технологической воде. Только переменная коррекции температуры. Отображаемая единица измерения: [млн. большие аквариумы в зоопарках, оценка биологического состояния поверхностных вод.
Отображаемые единицы: [ppm] и [% насыщения кислородом]DACa, AEGIS II, D1C: Калибровка возможна только в том случае, если вводится эталонная концентрация, определенная по технологической воде. Только переменная коррекции температуры. Отображаемая единица измерения: [млн. большие аквариумы в зоопарках, оценка биологического состояния поверхностных вод.
 Пожалуйста, повторите попытку позже.
Пожалуйста, повторите попытку позже. физические и психические функции (Gassert and Dietz, 2018; D’Onofrio et al., 2019; Сеспедес и др., 2021). Интеграция искусственного интеллекта, бионики, робототехники и реабилитационной медицины способствовала развитию индустрии реабилитационных роботов (Su et al., 2018; Wu et al., 2018, 2020, 2021b; Liang and Su, 2019). Благодаря инновациям в технологии реабилитационный робот обладает характеристиками точного движения и длительной повторяющейся работы, что дает очень хорошее решение многих сложных реальных проблем, таких как сложность стандартизации реабилитационного движения, нехватка реабилитационных врачей. и растущее число пациентов с инсультом (Deng et al., 2021а,б; Ву и др., 2021а). Lokomat разработан как самый известный робот для реабилитации нижних конечностей, который был проведен во многих клинических исследованиях (Lee et al., 2021; Maggio et al., 2021; van Kammen et al., 2021). В основном он состоит из трех частей: тренажера для ходьбы, подвесной системы для похудения и беговой платформы.
физические и психические функции (Gassert and Dietz, 2018; D’Onofrio et al., 2019; Сеспедес и др., 2021). Интеграция искусственного интеллекта, бионики, робототехники и реабилитационной медицины способствовала развитию индустрии реабилитационных роботов (Su et al., 2018; Wu et al., 2018, 2020, 2021b; Liang and Su, 2019). Благодаря инновациям в технологии реабилитационный робот обладает характеристиками точного движения и длительной повторяющейся работы, что дает очень хорошее решение многих сложных реальных проблем, таких как сложность стандартизации реабилитационного движения, нехватка реабилитационных врачей. и растущее число пациентов с инсультом (Deng et al., 2021а,б; Ву и др., 2021а). Lokomat разработан как самый известный робот для реабилитации нижних конечностей, который был проведен во многих клинических исследованиях (Lee et al., 2021; Maggio et al., 2021; van Kammen et al., 2021). В основном он состоит из трех частей: тренажера для ходьбы, подвесной системы для похудения и беговой платформы. Indego — это носимый робот для реабилитации нижних конечностей, разработанный Университетом Вандербильта в США (Tan et al., 2020). Пользователь может удерживать равновесие тела с помощью трости, опирающейся на предплечье, или автоматического вспомогательного приспособления для ходьбы.Физиотерапевт имеет функции пассивного обучения и активного обучения и может реализовать взаимодействие между оператором и роботом через разработанный человеко-компьютерный интерфейс (Акдоган и Адли, 2011). Тем не менее, точная тренировка, основанная на целевом диапазоне движений пациента в суставах, способствует эффективности реабилитации конечностей пациентов. Диапазон движений в суставах, как важная оценка способности пациентов к совместной деятельности, относится к диапазону углов суставов конечностей пациентов, которым разрешено свободно двигаться.С точки зрения человеко-машинного взаимодействия реабилитационных роботов очень важно определить настройку безопасного для конечностей рабочего пространства пациента и особенно настройку защиты безопасности на уровне управления.
Indego — это носимый робот для реабилитации нижних конечностей, разработанный Университетом Вандербильта в США (Tan et al., 2020). Пользователь может удерживать равновесие тела с помощью трости, опирающейся на предплечье, или автоматического вспомогательного приспособления для ходьбы.Физиотерапевт имеет функции пассивного обучения и активного обучения и может реализовать взаимодействие между оператором и роботом через разработанный человеко-компьютерный интерфейс (Акдоган и Адли, 2011). Тем не менее, точная тренировка, основанная на целевом диапазоне движений пациента в суставах, способствует эффективности реабилитации конечностей пациентов. Диапазон движений в суставах, как важная оценка способности пациентов к совместной деятельности, относится к диапазону углов суставов конечностей пациентов, которым разрешено свободно двигаться.С точки зрения человеко-машинного взаимодействия реабилитационных роботов очень важно определить настройку безопасного для конечностей рабочего пространства пациента и особенно настройку защиты безопасности на уровне управления.
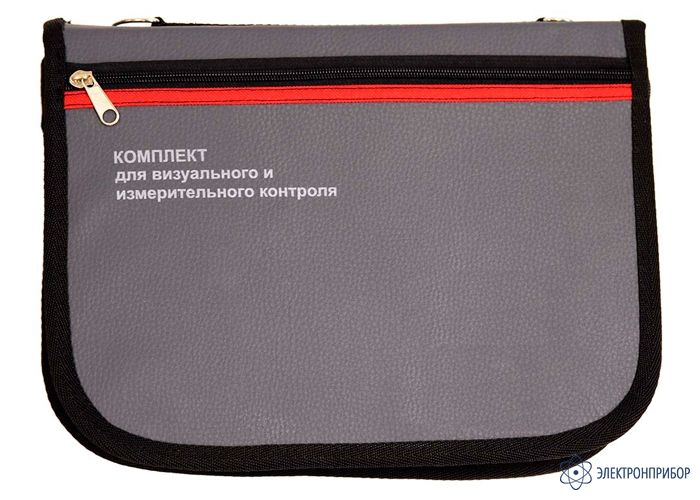 Он рассчитывает диапазон движения сустава, обнаруживая изменения вспомогательного механического узла. Исследователи также провели обширные исследования метода измерения диапазона движений в суставах, объединив различные сенсорные технологии.
Он рассчитывает диапазон движения сустава, обнаруживая изменения вспомогательного механического узла. Исследователи также провели обширные исследования метода измерения диапазона движений в суставах, объединив различные сенсорные технологии. , 2016). Для роботов-экзоскелетов нижних конечностей предлагается устройство обнаружения походки, которое интегрировано с интеллектуальным датчиком в обуви и имеет компактную конструкцию и высокую практичность (Zeng et al., 2021). С развитием технологии камер технология машинного зрения также внедряется в область реабилитации человеческих конечностей (Gherman et al., 2019; Даль и др., 2020; Мавор и др., 2020). Однако для большинства систем оценки функций конечностей человека, основанных на машинном зрении, требуется комбинация камер. Трехмерные системы захвата движения с 12 камерами обеспечивают превосходную точность и надежность, но они дороги и требуют установки на большой площади (Linkel et al., 2016). В настоящее время MS Kinect (Microsoft Corp., Редмонд, Вашингтон, США) представляет собой недорогой готовый датчик движения, изначально разработанный для видеоигр, который можно адаптировать для анализа позы и баланса при выполнении упражнений (Кларк и другие., 2015). Kinect может извлекать временные и пространственные параметры походки человека, что не требует точного представления костей и сегментов конечностей человека, что решает проблему мониторинга событий, таких как риск падения пожилых людей (Dubois and Bresciani, 2018).
, 2016). Для роботов-экзоскелетов нижних конечностей предлагается устройство обнаружения походки, которое интегрировано с интеллектуальным датчиком в обуви и имеет компактную конструкцию и высокую практичность (Zeng et al., 2021). С развитием технологии камер технология машинного зрения также внедряется в область реабилитации человеческих конечностей (Gherman et al., 2019; Даль и др., 2020; Мавор и др., 2020). Однако для большинства систем оценки функций конечностей человека, основанных на машинном зрении, требуется комбинация камер. Трехмерные системы захвата движения с 12 камерами обеспечивают превосходную точность и надежность, но они дороги и требуют установки на большой площади (Linkel et al., 2016). В настоящее время MS Kinect (Microsoft Corp., Редмонд, Вашингтон, США) представляет собой недорогой готовый датчик движения, изначально разработанный для видеоигр, который можно адаптировать для анализа позы и баланса при выполнении упражнений (Кларк и другие., 2015). Kinect может извлекать временные и пространственные параметры походки человека, что не требует точного представления костей и сегментов конечностей человека, что решает проблему мониторинга событий, таких как риск падения пожилых людей (Dubois and Bresciani, 2018). На основе метода виртуальной триангуляции разработана система оценки движения плечевого сустава пациентов на основе датчиков Kinect V2, которая может решить решение для диапазона движений одного плечевого сустава пациентов за один раз (Cai et al., 2019; Чубукчу и др., 2020 г.; Форман и Энгсберг, 2020 г.). Однако, как повысить эффективность многосуставного измерения диапазона движений в сочетании с обучающим методом тяговой тренировки врача-реабилитолога, как с помощью одной камеры точно решить задачу многосуставной оценки пространственного движения нижних конечностей человека , и как избежать окклюзии камеры в процессе работы реабилитационных врачей, являются важной основой для точного ввода информации о движении нижних конечностей реабилитационного робота.
На основе метода виртуальной триангуляции разработана система оценки движения плечевого сустава пациентов на основе датчиков Kinect V2, которая может решить решение для диапазона движений одного плечевого сустава пациентов за один раз (Cai et al., 2019; Чубукчу и др., 2020 г.; Форман и Энгсберг, 2020 г.). Однако, как повысить эффективность многосуставного измерения диапазона движений в сочетании с обучающим методом тяговой тренировки врача-реабилитолога, как с помощью одной камеры точно решить задачу многосуставной оценки пространственного движения нижних конечностей человека , и как избежать окклюзии камеры в процессе работы реабилитационных врачей, являются важной основой для точного ввода информации о движении нижних конечностей реабилитационного робота. Посредством анализа принципа формирования изображения камеры RGB-D устанавливается соответствующая связь между информацией об изображении и координатами в трехмерном пространстве. Маркеры расположены разумно на пациенте и реабилитационном роботе, а информация о движении суставов нижних конечностей преобразуется в информацию о движении маркеров.Затем метод пороговой сегментации и другие связанные принципы используются для завершения извлечения маркеров. Объем движений тазобедренного сустава в коронарной и сагиттальной плоскостях и объем движений коленного сустава в сагиттальной плоскости рассчитывали методом векторного произведения. Наконец, проводится эксперимент для проверки предложенного метода.
Посредством анализа принципа формирования изображения камеры RGB-D устанавливается соответствующая связь между информацией об изображении и координатами в трехмерном пространстве. Маркеры расположены разумно на пациенте и реабилитационном роботе, а информация о движении суставов нижних конечностей преобразуется в информацию о движении маркеров.Затем метод пороговой сегментации и другие связанные принципы используются для завершения извлечения маркеров. Объем движений тазобедренного сустава в коронарной и сагиттальной плоскостях и объем движений коленного сустава в сагиттальной плоскости рассчитывали методом векторного произведения. Наконец, проводится эксперимент для проверки предложенного метода. , соответственно. Коленный сустав и голеностопный сустав упрощены как одна вращательная пара, которая вращается вокруг оси, параллельной коронарной оси. Бедро, икра и стопа на нижней конечности человека упрощены как соединительные стержни. На рис. 1 представлена схема пространственного движения жесткого рычажного механизма нижних конечностей человека.Установите направление движения для вращения против часовой стрелки тазобедренного сустава и голеностопного сустава как положительное, а направление движения коленного сустава для вращения по часовой стрелке как положительное. Для описания движения тазобедренного сустава в сагиттальной плоскости за нулевой угол амплитуды движения тазобедренного сустава принята ось х , а угол θ h3 между бедром и положительной направление оси x принимается за диапазон движения тазобедренного сустава. Линия продолжения жесткой связи бедра принимается за нулевой опорный угол угла движения коленного сустава, а угол θ 2 между линией продолжения жесткой связи бедра и жесткой связи голени является диапазоном коленного сустава движение.
, соответственно. Коленный сустав и голеностопный сустав упрощены как одна вращательная пара, которая вращается вокруг оси, параллельной коронарной оси. Бедро, икра и стопа на нижней конечности человека упрощены как соединительные стержни. На рис. 1 представлена схема пространственного движения жесткого рычажного механизма нижних конечностей человека.Установите направление движения для вращения против часовой стрелки тазобедренного сустава и голеностопного сустава как положительное, а направление движения коленного сустава для вращения по часовой стрелке как положительное. Для описания движения тазобедренного сустава в сагиттальной плоскости за нулевой угол амплитуды движения тазобедренного сустава принята ось х , а угол θ h3 между бедром и положительной направление оси x принимается за диапазон движения тазобедренного сустава. Линия продолжения жесткой связи бедра принимается за нулевой опорный угол угла движения коленного сустава, а угол θ 2 между линией продолжения жесткой связи бедра и жесткой связи голени является диапазоном коленного сустава движение. Для амплитуды движений тазобедренного сустава во фронтальной плоскости сагиттальная плоскость принимается за нулевую плоскость отсчета, а угол между плоскостью, содержащей бедро и голень человека, и нулевой опорной плоскостью принимается за диапазон движения тазобедренного сустава. θ h2 в коронарной плоскости, в которой направление расширения наружу установлено как прямое направление движения в суставе.
Для амплитуды движений тазобедренного сустава во фронтальной плоскости сагиттальная плоскость принимается за нулевую плоскость отсчета, а угол между плоскостью, содержащей бедро и голень человека, и нулевой опорной плоскостью принимается за диапазон движения тазобедренного сустава. θ h2 в коронарной плоскости, в которой направление расширения наружу установлено как прямое направление движения в суставе. Необходимо проанализировать взаимосвязь между RGB-камерой и камерой глубины и определить трехмерные координаты целевого объекта путем объединения цветных изображений и изображений глубины. Модель изображения с цветной камерой на самом деле представляет собой преобразование точки из трехмерного пространства в пиксель, включающее систему координат пикселя в изображении, физическую систему координат в изображении и систему координат камеры в трехмерном пространстве. Процесс видеосъемки заключается в том, что объект в системе координат камеры в трехмерном пространстве трансформируется в пиксельную систему координат.
Необходимо проанализировать взаимосвязь между RGB-камерой и камерой глубины и определить трехмерные координаты целевого объекта путем объединения цветных изображений и изображений глубины. Модель изображения с цветной камерой на самом деле представляет собой преобразование точки из трехмерного пространства в пиксель, включающее систему координат пикселя в изображении, физическую систему координат в изображении и систему координат камеры в трехмерном пространстве. Процесс видеосъемки заключается в том, что объект в системе координат камеры в трехмерном пространстве трансформируется в пиксельную систему координат. Началом системы координат является верхняя левая угловая вершина изображения, ось u параллельна оси x физической системы координат, а ось v параллельна оси y. -ось физической системы координат.Пусть точка P BE ( U P
Началом системы координат является верхняя левая угловая вершина изображения, ось u параллельна оси x физической системы координат, а ось v параллельна оси y. -ось физической системы координат.Пусть точка P BE ( U P  Как показано на рисунке 3, система координат камеры создается с оптическим центром в качестве начала координат.Оси X и Y параллельны осям x и y системы координат изображения соответственно. Затем создается ось Z по правилу правой руки. Пусть координаты пункта p в системе координат камеры be ( x P
Как показано на рисунке 3, система координат камеры создается с оптическим центром в качестве начала координат.Оси X и Y параллельны осям x и y системы координат изображения соответственно. Затем создается ось Z по правилу правой руки. Пусть координаты пункта p в системе координат камеры be ( x P  После перемещения фазовой плоскости вдоль положительного направления оси z , в соответствии с принципом формирования изображения, изображение в это время представляет собой вертикальное изображение равного размера, и уравнение (2) преобразуется в следующее:
После перемещения фазовой плоскости вдоль положительного направления оси z , в соответствии с принципом формирования изображения, изображение в это время представляет собой вертикальное изображение равного размера, и уравнение (2) преобразуется в следующее:
 Для одной и той же точки пространства их координаты несовместимы. Поскольку пиксельная система координат и система координат камеры камеры глубины и цветной камеры устанавливаются одинаково, а относительные физические положения камеры глубины и цветной камеры неизменны на одном и том же оборудовании, матрица вращения R и вектор смещения t можно использовать для преобразования координат между двумя системами координат камеры.Установите внутренний параметр камеры глубины как K d и внутренний параметр цветной камеры как K c . Пусть координаты пункта P на изображении Be ( U D
Для одной и той же точки пространства их координаты несовместимы. Поскольку пиксельная система координат и система координат камеры камеры глубины и цветной камеры устанавливаются одинаково, а относительные физические положения камеры глубины и цветной камеры неизменны на одном и том же оборудовании, матрица вращения R и вектор смещения t можно использовать для преобразования координат между двумя системами координат камеры.Установите внутренний параметр камеры глубины как K d и внутренний параметр цветной камеры как K c . Пусть координаты пункта P на изображении Be ( U D 
 Поскольку нулевой опорный угол тазобедренного сустава необходимо установить в сагиттальной плоскости, маркер расположен на одной стороне сиденья робота для реабилитации нижних конечностей, и его направление длины должно быть параллельно поверхности сиденья, что является нулевой точкой отсчета угла движения бедра. При размещении камеры RGB-D она должна быть обращена к сагиттальной плоскости пациента, а все маркеры должны находиться в зоне захвата камеры во время движения конечности пациента.
Поскольку нулевой опорный угол тазобедренного сустава необходимо установить в сагиттальной плоскости, маркер расположен на одной стороне сиденья робота для реабилитации нижних конечностей, и его направление длины должно быть параллельно поверхности сиденья, что является нулевой точкой отсчета угла движения бедра. При размещении камеры RGB-D она должна быть обращена к сагиттальной плоскости пациента, а все маркеры должны находиться в зоне захвата камеры во время движения конечности пациента. Врачу-реабилитологу необходимо оттянуть тазобедренный сустав больного до его максимального и минимального угла движения, ограниченного в положении сидя. При измерении объема движений коленного сустава в сагиттальной плоскости тазобедренный сустав должен оставаться неподвижным. Врач-реабилитолог тащит ногу пациента, чтобы заставить икру двигаться в сагиттальной плоскости. Полученное RGB-изображение показано на рис. 6. При определении диапазона движений тазобедренного сустава в коронарной плоскости коленный сустав пациента согнут под удобным углом.Затем ногу пациента тянут, чтобы повернуть бедро в коронарной плоскости. RGB-изображение показано на рис. 7. Следует отметить, что в процессе перетаскивания маркер не должен блокироваться, чтобы не влиять на получение камерой информации об изображении.
Врачу-реабилитологу необходимо оттянуть тазобедренный сустав больного до его максимального и минимального угла движения, ограниченного в положении сидя. При измерении объема движений коленного сустава в сагиттальной плоскости тазобедренный сустав должен оставаться неподвижным. Врач-реабилитолог тащит ногу пациента, чтобы заставить икру двигаться в сагиттальной плоскости. Полученное RGB-изображение показано на рис. 6. При определении диапазона движений тазобедренного сустава в коронарной плоскости коленный сустав пациента согнут под удобным углом.Затем ногу пациента тянут, чтобы повернуть бедро в коронарной плоскости. RGB-изображение показано на рис. 7. Следует отметить, что в процессе перетаскивания маркер не должен блокироваться, чтобы не влиять на получение камерой информации об изображении.
 Сравнивая L с установленным порогом T , пиксель, значение расстояния которого меньше установленного порога T , устанавливается равным (255, 255, 255), в противном случае он устанавливается равным (0, 0, 0) , что можно выразить следующим образом:
Сравнивая L с установленным порогом T , пиксель, значение расстояния которого меньше установленного порога T , устанавливается равным (255, 255, 255), в противном случае он устанавливается равным (0, 0, 0) , что можно выразить следующим образом: Поскольку координаты маркеров описываются в системе координат камеры, необходимо установить отношение преобразования между системой координат и системой координат камеры. Данные изображения собираются в соответствии с режимом движения измерения диапазона движения коленного сустава способом, описанным в разделе «Получение информации об изображении», а координаты полученных маркеров на голени в системе координат камеры являются плоскими. установлены. В пиксельных координатах нескольких пикселей для участия в анализе выбирается только один пиксель, а значение глубины точки должно быть медианным значением значения глубины группы пикселей.Координаты требуемых пикселей в пиксельной системе координат в сочетании со значениями их глубины преобразуются в систему координат камеры для описания, а координата ( x i , y i , z i ) в системе координат камеры, где максимальное значение i равно k , что является количеством пикселей.
Поскольку координаты маркеров описываются в системе координат камеры, необходимо установить отношение преобразования между системой координат и системой координат камеры. Данные изображения собираются в соответствии с режимом движения измерения диапазона движения коленного сустава способом, описанным в разделе «Получение информации об изображении», а координаты полученных маркеров на голени в системе координат камеры являются плоскими. установлены. В пиксельных координатах нескольких пикселей для участия в анализе выбирается только один пиксель, а значение глубины точки должно быть медианным значением значения глубины группы пикселей.Координаты требуемых пикселей в пиксельной системе координат в сочетании со значениями их глубины преобразуются в систему координат камеры для описания, а координата ( x i , y i , z i ) в системе координат камеры, где максимальное значение i равно k , что является количеством пикселей.
 Где j представляет количество кадров изображения, i представляет количество пикселей маркера, описанного в кадре j . Следует отметить, что диапазон значений и в трех группах координат одинаков, но диапазон значений и не одинаков. Проецируя вышеуказанные координаты на сагиттальную плоскость, координаты камеры (x′kij,y′kij,z′kij),(x′xij,y′xij,z′xij) и (x′lij,y′lij ,z′lij).
Где j представляет количество кадров изображения, i представляет количество пикселей маркера, описанного в кадре j . Следует отметить, что диапазон значений и в трех группах координат одинаков, но диапазон значений и не одинаков. Проецируя вышеуказанные координаты на сагиттальную плоскость, координаты камеры (x′kij,y′kij,z′kij),(x′xij,y′xij,z′xij) и (x′lij,y′lij ,z′lij). Возьмите одну точку ( x o , y o , z o ) в плоскости в качестве начала координат, ) — положительное направление оси x , а направление единичного вектора ( u, v, w ) — положительное направление оси y . Математическое описание оси z определяется правилом правой руки.На данный момент установление системы координат x-o-y-z завершено. Координаты (x′kij,y′kij,z′kij), (x′xij,y′xij,z′xij) и (x′lij,y′lij,z′lij) в системе координат камеры равны преобразуется в систему координат xoyz , а координаты преобразуются в (x″ki1,y″ki1,0),(x″xi1,y″xi1,0) и (x″li1,y″li1,0 ). Поскольку значение z каждой координаты равно 0, трехмерная координатная задача была преобразована в двумерную в системе координат x-o-y .
Возьмите одну точку ( x o , y o , z o ) в плоскости в качестве начала координат, ) — положительное направление оси x , а направление единичного вектора ( u, v, w ) — положительное направление оси y . Математическое описание оси z определяется правилом правой руки.На данный момент установление системы координат x-o-y-z завершено. Координаты (x′kij,y′kij,z′kij), (x′xij,y′xij,z′xij) и (x′lij,y′lij,z′lij) в системе координат камеры равны преобразуется в систему координат xoyz , а координаты преобразуются в (x″ki1,y″ki1,0),(x″xi1,y″xi1,0) и (x″li1,y″li1,0 ). Поскольку значение z каждой координаты равно 0, трехмерная координатная задача была преобразована в двумерную в системе координат x-o-y . Возьмите любой маркер на бедре на изображении в качестве примера для анализа. Пусть подобранное линейное уравнение будет:
Возьмите любой маркер на бедре на изображении в качестве примера для анализа. Пусть подобранное линейное уравнение будет: Параметры b k , b x и b l неотрицательны
θk={arccosec·el|ek||el|(el×ek≥0)-arccosec·el|ek||el|(el×ek<0) (13)
Параметры b k , b x и b l неотрицательны
θk={arccosec·el|ek||el|(el×ek≥0)-arccosec·el|ek||el|(el×ek<0) (13) По вышеописанным методам изображения собираются и обрабатываются, и маркеры на бедре и голени каждого кадра подгоняются по формуле (11), а векторы нормалей e j = ( a j , b j , c j ) каждой плоскости, где j – количество кадров изображения.Угол движения тазобедренного сустава во фронтальной плоскости: 9000.
θj=arccos|ej·e1||ej|·|e1| (15)
По вышеописанным методам изображения собираются и обрабатываются, и маркеры на бедре и голени каждого кадра подгоняются по формуле (11), а векторы нормалей e j = ( a j , b j , c j ) каждой плоскости, где j – количество кадров изображения.Угол движения тазобедренного сустава во фронтальной плоскости: 9000.
θj=arccos|ej·e1||ej|·|e1| (15) ), выбирается.Разрешение цветного изображения и изображения глубины камеры может достигать 1280 * 720, а частота кадров может достигать 30 кадров в секунду. Поскольку для эксперимента необходимо получить информацию о координатах маркера в трехмерном пространстве, точность информации о глубине будет иметь прямое влияние на точность системы обнаружения. Точность камеры L515 составляет <5 мм на расстоянии 1 м и <14 мм на расстоянии 9 м. Необходимо следить за тем, чтобы камера могла фиксировать маркеры во время движения конечности пациента, а расстояние между камерой и пораженной конечностью равнялось 0.8–1,5 м. Поскольку контрольная группа не может быть точно установлена, чтобы доказать правильность угла, измеренного в эксперименте с нижней конечностью человека, механическая нога, заменившая нижнюю конечность человека, адаптирована, как показано на рисунке 9.
), выбирается.Разрешение цветного изображения и изображения глубины камеры может достигать 1280 * 720, а частота кадров может достигать 30 кадров в секунду. Поскольку для эксперимента необходимо получить информацию о координатах маркера в трехмерном пространстве, точность информации о глубине будет иметь прямое влияние на точность системы обнаружения. Точность камеры L515 составляет <5 мм на расстоянии 1 м и <14 мм на расстоянии 9 м. Необходимо следить за тем, чтобы камера могла фиксировать маркеры во время движения конечности пациента, а расстояние между камерой и пораженной конечностью равнялось 0.8–1,5 м. Поскольку контрольная группа не может быть точно установлена, чтобы доказать правильность угла, измеренного в эксперименте с нижней конечностью человека, механическая нога, заменившая нижнюю конечность человека, адаптирована, как показано на рисунке 9.
 Чтобы проверить повторяющуюся точность разработанной системы обнаружения движения сустава в сагиттальной плоскости, икра предназначена для многократных движений вперед и назад, в то время как бедро неподвижно, и максимальное и минимальное значения угла движения в каждом движения вперед и назад определяются случайным образом.Конкретные данные показаны на рисунке 11А. Соответствующие пиковые значения углов, полученные двумя вышеуказанными способами во времени, анализируются здесь, и результаты анализа показаны на рисунке 11B.
Чтобы проверить повторяющуюся точность разработанной системы обнаружения движения сустава в сагиттальной плоскости, икра предназначена для многократных движений вперед и назад, в то время как бедро неподвижно, и максимальное и минимальное значения угла движения в каждом движения вперед и назад определяются случайным образом.Конкретные данные показаны на рисунке 11А. Соответствующие пиковые значения углов, полученные двумя вышеуказанными способами во времени, анализируются здесь, и результаты анализа показаны на рисунке 11B.
 Чтобы предотвратить ошибку определения максимального угла, вызванную возможной импульсной интерференцией, для полученных углов движения в коронарной плоскости выполняется обработка фильтрации среднего значения медианы, и результат показан на фиг. 12А. Соответствующие пиковые значения углов, полученные двумя вышеуказанными способами во времени, анализируются, и результаты анализа показаны на фигуре 12В.
Чтобы предотвратить ошибку определения максимального угла, вызванную возможной импульсной интерференцией, для полученных углов движения в коронарной плоскости выполняется обработка фильтрации среднего значения медианы, и результат показан на фиг. 12А. Соответствующие пиковые значения углов, полученные двумя вышеуказанными способами во времени, анализируются, и результаты анализа показаны на фигуре 12В. При измерении объема движений в суставах в сагиттальной плоскости речь идет о максимальном и минимальном значениях измеряемых суставных углов. Поэтому здесь анализируются соответствующие пиковые значения углов, полученные предлагаемым способом и способом через датчик угла (WT61C) во времени, и результаты анализа показаны на рисунке 11B. Он показывает разницу δ между углом на пике, полученным предлагаемой системой обнаружения и датчиком угла. Из рисунка 11Б видно, что угол в сагиттальной плоскости, измеренный разработанной предлагаемой системой обнаружения, является относительно консервативным, а максимальная ошибка измерения не превышает 2.2 степени. Он также показывает разницу δ в коронарной плоскости между углом на пике, полученным предлагаемой системой обнаружения и датчиком угла. Из рисунка 12Б видно, что максимальная погрешность измерения между углом, измеренным предлагаемой системой обнаружения, и датчиком угла составляет не более 2,65 градуса.
При измерении объема движений в суставах в сагиттальной плоскости речь идет о максимальном и минимальном значениях измеряемых суставных углов. Поэтому здесь анализируются соответствующие пиковые значения углов, полученные предлагаемым способом и способом через датчик угла (WT61C) во времени, и результаты анализа показаны на рисунке 11B. Он показывает разницу δ между углом на пике, полученным предлагаемой системой обнаружения и датчиком угла. Из рисунка 11Б видно, что угол в сагиттальной плоскости, измеренный разработанной предлагаемой системой обнаружения, является относительно консервативным, а максимальная ошибка измерения не превышает 2.2 степени. Он также показывает разницу δ в коронарной плоскости между углом на пике, полученным предлагаемой системой обнаружения и датчиком угла. Из рисунка 12Б видно, что максимальная погрешность измерения между углом, измеренным предлагаемой системой обнаружения, и датчиком угла составляет не более 2,65 градуса.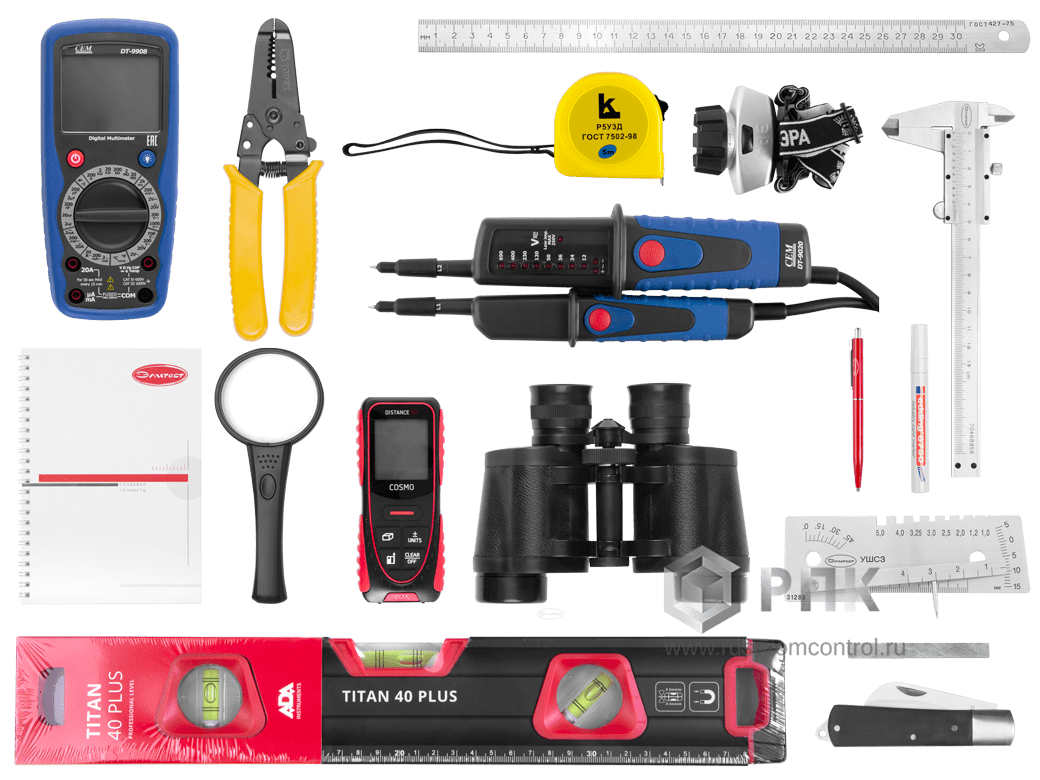 Большинство исследований сосредоточено на параметрах походки и методе их оценки с использованием системы OptiTrack и Kinect, таких как длина шага, продолжительность шага, частота шагов и скорость ходьбы, чьи сообщения отличаются от нашего исследования.Анализы надежности и достоверности системы измерения движений плеч на основе Kinect V2 исследовались в литературе (Çubukçu et al., 2020). Средние отличия клинического гониометра от измерительной системы на базе Kinect V2 (MDCGK), средние отличия цифрового гониометра от измерительной системы на базе Kinect V2 (MDDGK) и средние отличия углового датчика от предложенного метода на основе камеры L515 (MDALC) показаны в таблице 1. По сравнению с эффективностью измерения коронарного отведения и приведения и сагиттального сгибания и разгибания плеча предлагаемая система измерения пространственного движения нижних конечностей на основе камеры L515 также имеет хорошую относительную эффективность.
Большинство исследований сосредоточено на параметрах походки и методе их оценки с использованием системы OptiTrack и Kinect, таких как длина шага, продолжительность шага, частота шагов и скорость ходьбы, чьи сообщения отличаются от нашего исследования.Анализы надежности и достоверности системы измерения движений плеч на основе Kinect V2 исследовались в литературе (Çubukçu et al., 2020). Средние отличия клинического гониометра от измерительной системы на базе Kinect V2 (MDCGK), средние отличия цифрового гониометра от измерительной системы на базе Kinect V2 (MDDGK) и средние отличия углового датчика от предложенного метода на основе камеры L515 (MDALC) показаны в таблице 1. По сравнению с эффективностью измерения коронарного отведения и приведения и сагиттального сгибания и разгибания плеча предлагаемая система измерения пространственного движения нижних конечностей на основе камеры L515 также имеет хорошую относительную эффективность.
 Проведен сценический эксперимент с человеком в петле, результаты которого подтверждают эффективность предложенного метода. Однако, учитывая сложность строения скелетных мышц нижних конечностей человека, в качестве объекта исследования в данной работе использовалось обычное жесткое тело реабилитационной механической ноги. Поэтому при практическом клиническом применении, особенно у больных с дисфункциональными конечностями, до сих пор предъявляются высокие требования к положению и форме оклейки мейкеров. Поскольку расположение производителей, однородность собственной формы и интенсивность света в процессе измерения также будут влиять на результаты измерений.В дальнейшем мы будем дополнительно изучать направления подразделения, такие как однородность производителей, интенсивность света камеры и клинические испытания.
Проведен сценический эксперимент с человеком в петле, результаты которого подтверждают эффективность предложенного метода. Однако, учитывая сложность строения скелетных мышц нижних конечностей человека, в качестве объекта исследования в данной работе использовалось обычное жесткое тело реабилитационной механической ноги. Поэтому при практическом клиническом применении, особенно у больных с дисфункциональными конечностями, до сих пор предъявляются высокие требования к положению и форме оклейки мейкеров. Поскольку расположение производителей, однородность собственной формы и интенсивность света в процессе измерения также будут влиять на результаты измерений.В дальнейшем мы будем дополнительно изучать направления подразделения, такие как однородность производителей, интенсивность света камеры и клинические испытания.
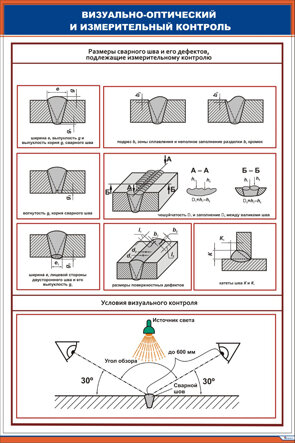 C.Wong Magna Fund в Университете Нинбо, Китай.
C.Wong Magna Fund в Университете Нинбо, Китай. А. (2011).Разработка и управление роботом лечебной физкультуры для реабилитации нижних конечностей: физиотерапевт. Мехатроника 21, 509–522. doi: 10.1016/j.mechatronics.2011.01.005
А. (2011).Разработка и управление роботом лечебной физкультуры для реабилитации нижних конечностей: физиотерапевт. Мехатроника 21, 509–522. doi: 10.1016/j.mechatronics.2011.01.005 Перед. Нейроробот . 15, 1–12. doi: 10.3389/fnbot.2021.612034
Перед. Нейроробот . 15, 1–12. doi: 10.3389/fnbot.2021.612034 Мед. англ. Физ . 76, 20–31.doi: 10.1016/j.medengphy.2019.10.017
Мед. англ. Физ . 76, 20–31.doi: 10.1016/j.medengphy.2019.10.017 , Fiorini, L., Hoshino, H., Matsumori, A., Okabe, Y., Tsukamoto, M., et al. (2019). Вспомогательные роботы для социализации пожилых людей: результаты, относящиеся к потребностям пользователей. Клиника старения. Эксп. Рез . 31, 1313–1329. doi: 10.1007/s40520-018-1073-z
, Fiorini, L., Hoshino, H., Matsumori, A., Okabe, Y., Tsukamoto, M., et al. (2019). Вспомогательные роботы для социализации пожилых людей: результаты, относящиеся к потребностям пользователей. Клиника старения. Эксп. Рез . 31, 1313–1329. doi: 10.1007/s40520-018-1073-z Перед. Нейроробот . 15, 1–13. doi: 10.3389/fnbot.2021.650118
Перед. Нейроробот . 15, 1–13. doi: 10.3389/fnbot.2021.650118 , Бирлеску И., Плитеа Н., Карбоне Г., Тарнита Д. и Писла Д.(2019). О свободном от сингулярностей рабочем пространстве параллельного робота для реабилитации нижних конечностей. Проц. Румынский акад. сер. А 20, 383–391.
, Бирлеску И., Плитеа Н., Карбоне Г., Тарнита Д. и Писла Д.(2019). О свободном от сингулярностей рабочем пространстве параллельного робота для реабилитации нижних конечностей. Проц. Румынский акад. сер. А 20, 383–391. Планирование траектории дельта-робота с заданным геометрическим ограничением на основе кривых Пифагора-годографа пятой степени. Заяв. науч. Базель 9:4491. дои: 10.3390/app9214491
Планирование траектории дельта-робота с заданным геометрическим ограничением на основе кривых Пифагора-годографа пятой степени. Заяв. науч. Базель 9:4491. дои: 10.3390/app9214491 (2018). Оптимальное по времени планирование траектории для дельта-робота на основе годографа Пифагора пятой степени. Доступ IEEE . 6, 28530–28539. дои: 10.1109/ДОСТУП.2018.2831663
(2018). Оптимальное по времени планирование траектории для дельта-робота на основе годографа Пифагора пятой степени. Доступ IEEE . 6, 28530–28539. дои: 10.1109/ДОСТУП.2018.2831663 и Блезер Г. (2019). Достоверность трехмерной кинематики суставов на основе инерциальных датчиков статических и динамических спортивных и физиотерапевтических движений. PLoS ONE 14:e0213064. doi: 10.1371/journal.pone.0213064
и Блезер Г. (2019). Достоверность трехмерной кинематики суставов на основе инерциальных датчиков статических и динамических спортивных и физиотерапевтических движений. PLoS ONE 14:e0213064. doi: 10.1371/journal.pone.0213064